
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
į┌═Ų╦]ŽĄĮyųąŻ¼ė├æ¶Ą─’@╩ĮĘ┤üĪóļ[╩ĮĘ┤üĪóš²Ę┤ü║═žōĘ┤üČ╝─▄ē“Ę┤ė│ė├æ¶ī”ė┌▒╗═Ų╦]╬’ŲĘĄ─Ų½║├ĪŻ▀@ą®Ę┤üą┼Žóį┌═Ų╦]ŽĄĮyųą╩«Ęųėąė├ĪŻ╚╗Č°Ż¼¼Fį┌Ą─┤¾ęÄ─Ż╔ŅČ╚═Ų╦]─Żą══∙═∙ęį³cō¶×ķ─┐ś╦Ż¼ų╗┐┤ųžęįė├涳cō¶ąą×ķ×ķ┤·▒ĒĄ─ļ[╩Įš²Ę┤üŻ¼Č°║÷┬į┴╦Ųõ╦³ėąą¦Ą─ė├æ¶Ę┤üą┼ŽóĪŻ
ū„š▀į┌▒Š╬─ųąĻPūóė├æ¶ČÓĘN’@╩Į/ļ[╩Į║═š²/žōĘ┤üą┼ŽóŻ¼īW┴Ģė├æ¶Ą─¤oŲ½┼d╚żŲ½║├ĪŻŠ▀¾wĄžŻ¼ū„š▀╠ß│÷┴╦ę╗éĆDeep Feedback Network (DFN)─Żą═Ż¼ŠC║Ž╩╣ė├┴╦ė├æ¶Ą─ļ[╩Įš²Ę┤üŻ©³cō¶ąą×ķŻ®Īóļ[╩ĮžōĘ┤üŻ©Ųž╣ŌĄ½╬┤³cō¶Ą─ąą×ķŻ®ęį╝░’@╩ĮžōĘ┤üŻ©³cō¶▓╗Ėą┼d╚ż░┤Ōoąą×ķŻ®Ą╚ą┼ŽóĪŻ
DFN─Żą═╩╣ė├┴╦internal feedback interaction componentūźūĪė├æ¶ąą×ķą“┴ąųąĄ─╝Ü┴ŻČ╚Ą─ąą×ķ╝ēäeĄ─Į╗╗źŻ¼╚╗║¾═©▀^external feedback interaction componentŻ¼╩╣ė├Š½┤_Ą½ŽĪ╔┘Ą─ļ[╩Įš²Ę┤ü║═’@╩ĮžōĘ┤üū„×ķ▒OČĮŻ¼Å─įļę¶▌^ČÓĄ─ļ[╩ĮžōĘ┤üųą▀Mę╗▓Į│ķ╚Īė├æ¶Ą─š²žōĘ┤üą┼ŽóĪŻį┌īŹ“×ųąŻ¼ū„š▀╗∙ė┌╬óą┼┐┤ę╗┐┤Ą─öĄō■Ż¼▀Mąą┴╦žSĖ╗Ą─ļxŠĆ║═į┌ŠĆīŹ“ׯ¼─Żą═┼cbaselineŽÓ▒╚Š∙╚ĪĄ├’@ų°╠ß╔²ĪŻ
1Īó─Żą═▒│Š░┼c║åĮķ
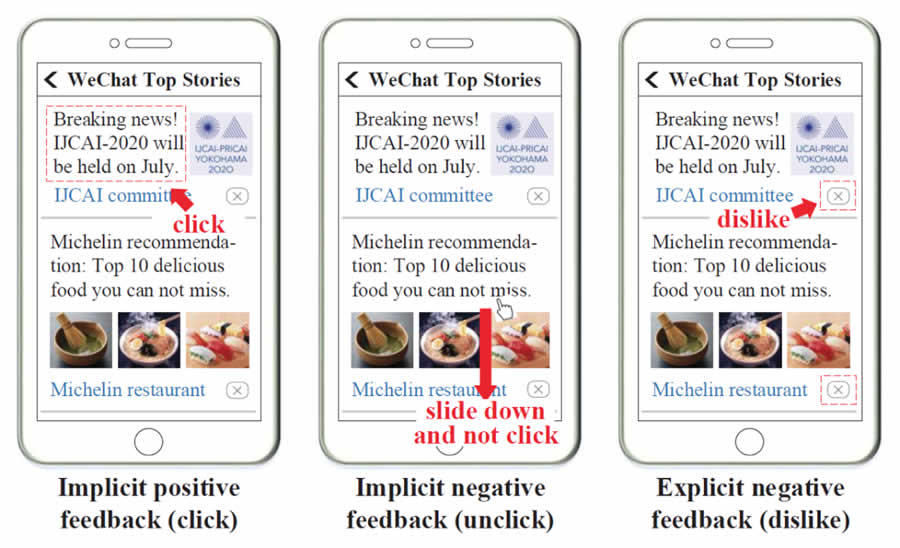
═Ų╦]ŽĄĮyį┌╚š│Ż╔·╗Ņųą▒╗ÅVĘ║╩╣ė├Ż¼×ķė├涽@╚Īą┼Žó┼cŖ╩śĘ╠ß╣®▒Ń└¹ĪŻ═Ų╦]ŽĄĮy╦ŃĘ©═∙═∙╗∙ė┌ė├æ¶┼cŽĄĮyĄ─Į╗╗źŻ¼▀@ą®Į╗╗źąą×ķ┐╔ęį┤¾ų┬Ęų×ķęįŽ┬ā╔ŅÉŻ║’@╩ĮĘ┤ü┼cļ[╩ĮĘ┤üĪŻ’@╩ĮĘ┤üÅ─ė├æ¶ī”ė┌╬’ŲĘĄ─ų▒ĮėæBČ╚ųą½@╚ĪŻ¼└²╚ńįušōųąĄ─ę╗ąŪĄĮ╬ÕąŪŻ¼╗“š▀╬óą┼┐┤ę╗┐┤ŽĄĮyųąĄ─Ī░▓╗Ėą┼d╚żĪ▒░┤ŌoĪŻ▀@ŅÉĘ┤ü─▄ē“ų▒Įė▒Ē▀_ė├æ¶Ą─š²Ž“ęį╝░žōŽ“Ų½║├Ż¼Ą½╩Ū▀@ŅÉĘ┤üĄ─öĄ┴┐═∙═∙▓╗ČÓĪŻļ[╩ĮĘ┤üÅ─ė├æ¶Ą─ąą×ķųąķgĮė½@Ą├Ż¼└²╚ńė├æ¶Ą─³cō¶/▓╗³cō¶ąą×ķĪŻ▀@ą®ą┼Žóį┌═Ų╦]ŽĄĮyųą═∙═∙╩Ū║Ż┴┐Ą─Ż¼Ą½╩Ū▀@ą®ą┼Žóėąų°▌^ČÓįļ┬ĢŻ©ė├涳cō¶Ą─▓ó▓╗ę╗Č©╩Ū╦¹šµš²Ž▓ÜgĄ─Ż®ĪŻ┴Ē═ŌŻ¼ļ[╩ĮĘ┤ü═©│Ż╩Ūęįš²Ę┤üĄ─ą╬╩Į│÷¼FŻ¼═Ų╦]ųąĄ─ļ[╩ĮžōĘ┤ü┤µį┌Š▐┤¾įļ┬ĢŻ©╬┤š╣¼Fą┼Žó╗“š▀╬┤³cō¶ą┼Žó▓ó▓╗ę╗Č©ęŌ╬Čų°ė├æ¶▓╗Ž▓Üg▀@ą®ā╚╚▌Ż®ĪŻ
į┌Į³Ų┌Ą─╔ŅČ╚═Ų╦]ŽĄĮyųąŻ¼CTRī¦Ž“Ą──┐ś╦╩▄ĄĮśO┤¾ĻPūóĪŻę“┤╦Ż¼─Żą═▓╗┐╔▒▄├ŌĄžų╗ĻPūó║═─┐ś╦Šo├▄ŽÓĻPĄ─ė├涳cō¶ąą×ķŻ¼║÷┬į┴╦Ųõ╦³ė├æ¶ąą×ķųą╠N║¼Ą─žSĖ╗ą┼ŽóĪŻāH┐╝æ]CTRī¦Ž“─┐ś╦Ą─═Ų╦]─Żą══∙═∙Ģ■ė÷ĄĮęįŽ┬ā╔éĆå¢Ņ}Ż║Ż©1Ż®CTRī¦Ž“─┐ś╦ų╗ĻPūóė├涎▓Üg╩▓├┤Ż¼ø]ėąĻPūóė├æ¶▓╗Ž▓Üg╩▓├┤ĪŻ▀@śėŻ¼─Żą═Ą─═Ų╦]ĮY╣¹╚▌ęū═¼┘|╗»║═┌ģ¤ß╗»Ż¼ōp║”ė├涾w“×ĪŻę“┤╦Ż¼žōĘ┤üą┼Žó╩Ū▒žę¬Ą─ĪŻŻ©2Ż®ė├æ¶│²┴╦▒╗äėĄžĮė╩▄ŽĄĮy═Ų╦]Ą─╬’ŲĘŻ¼ėąĢrę▓ąĶę¬─▄ē“ų„äė║═╝┤ĢrĄ─Ę┤üÖCųŲĪŻė├涎Ż═¹─▄ē“Ė▀ą¦║═£╩┤_ĄžĖµų¬ŽĄĮyūį╝║Ž▓Üg╗“š▀▓╗Ž▓Üg╩▓├┤ĪŻ┴Ē═ŌŻ¼ė├æ¶Ą─’@╩Į║═ļ[╩ĮĘ┤üų«ķgę▓Ģ■┤µį┌ĖŅ┴诩ė├涳cō¶Ą─▓ó▓╗ę╗Č©╩Ū╦¹šµš²Ž▓ÜgĄ─Ż®ĪŻę“┤╦Ż¼’@╩ĮĘ┤üę▓╩Ū▒žę¬Ą─ĪŻ’@╩Įą┼Žó║═ļ[╩Įą┼Žó─▄ē“ū„×ķ▒╦┤╦Ą─ča│õŻ¼ŽÓ▌oŽÓ│╔ĪŻęčėą╣żū„═©▀^╩╣ė├ė├æ¶Ą─╬┤³cō¶/╬┤Ųž╣Ōąą×ķū„×ķė├æ¶Ą─ļ[╩ĮžōĘ┤üŻ¼▀@śėĢ■ę²╚ļśO┤¾Ą─įļ┬ĢĪŻ┴Ē═Ōę╗ą®╣żū„ćLįć╩╣ė├ė├æ¶Ą─’@╩ĮžōĘ┤üą┼ŽóĪŻ▀@ą®ą┼Žó╣╠╚╗Š½┤_Ż¼Ą½╩Ūę▓═∙═∙▒╚▌^ŽĪ╩ĶĪŻ
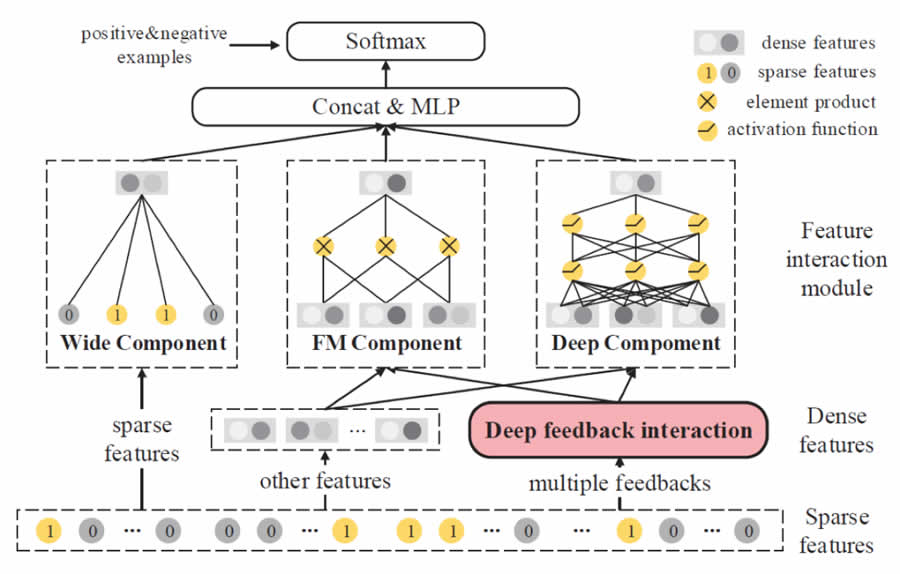
×ķ┴╦ĮŌøQ▀@ą®å¢Ņ}Ż¼ŠC║Ž╩╣ė├ė├æ¶ČÓĘN’@╩Į/ļ[╩Į║═š²/žōĘ┤üą┼ŽóīW┴ĢĖ³║├Ą─¤oŲ½ė├æ¶▒Ē╩ŠŻ¼ū„š▀╠ß│÷┴╦ę╗éĆDeep Feedback Network (DFN)─Żą═ĪŻłD1ųąĮo│÷┴╦į┌╬óą┼┐┤ę╗┐┤ł÷Š░ųąĄ─╚²ĘNė├æ¶Ę┤üĪŻDFN═©▀^internal feedback interaction componentūźūĪė├æ¶ąą×ķą“┴ąųąĄ─╝Ü┴ŻČ╚ąą×ķ╝ēäeĄ─Į╗╗źŻ¼╚╗║¾═©▀^external feedback interaction componentŻ¼╩╣ė├Š½┤_Ą½ŽĪ╔┘Ą─ļ[╩Įš²Ę┤ü║═’@╩ĮžōĘ┤üū„×ķ▒OČĮŻ¼Å─įļę¶▌^ČÓĄ─ļ[╩ĮžōĘ┤üųą▀Mę╗▓Į│ķ╚Īė├æ¶Ą─š²žōĘ┤üą┼ŽóĪŻ▀@ą®Ę┤ü╠žš„Ģ■║═Ųõ╦¹ė├æ¶/╬’ŲĘ╠žš„╗ņ║ŽŻ¼▓óąą╩╣ė├FMĪóDeep║═Wideīė▀Mąą╠žš„Į╗╗źŻ¼ūŅ║¾▀MąąCTRŅA╣└ĪŻ
ū„š▀╗∙ė┌╬óą┼┐┤ę╗┐┤═Ų╦]ŽĄĮyŻ¼įOėŗ┴╦ļxŠĆ║═ŠĆ╔ŽīŹ“ׯ¼į┌ČÓéĆųĖś╦╔ŽŠ▀ėą’@ų°╠ß╔²ĪŻ▀@Ų¬╣żū„Ą─ų„꬞Ģ½I╚ńŽ┬Ż║
1Īóū„š▀Ą┌ę╗┤╬╚┌║Žļ[╩Įš²Ę┤üŻ©³cō¶ąą×ķŻ®Īóļ[╩ĮžōĘ┤üŻ©Ųž╣ŌĄ½╬┤³cō¶Ą─ąą×ķŻ®Īó’@╩ĮžōĘ┤üŻ©³cō¶▓╗Ėą┼d╚ż░┤Ōoąą×ķŻ®║═╦³éāų«ķgĄ─Į╗╗źą┼Žó▀Mąąė├æ¶ąą×ķĮ©─ŻŻ╗
2Īóū„š▀╠ß│÷┴╦ę╗éĆ╚½ą┬Ą─Deep Feedback Network (DFN)─Żą═Ż¼─▄ē“īW┴ĢĄĮė├涤oŲ½Ą─┼d╚żŲ½║├Ż╗
3Īó─Żą═į┌ļxŠĆ║═į┌ŠĆ╚╬äš╔ŽČ╝Ą├ĄĮ┴╦’@ų°╠ß╔²Ż¼Š▀ėą╣żśI╝ēīŹė├ārųĄĪŻšō╬─ųąę▓╠ß│÷┴╦ę╗éĆfeed┴„ųąĄ─’@╩ĮžōĘ┤üŅA£y╚╬äšĪŻ
2Īó─Żą═ĮYśŗ
DFN─Żą═ų„ę¬Ęų×ķ╚²éĆļAČ╬Ż║╩ūŽ╚Ż¼deep feedback interaction moduleęįė├æ¶Ą─ČÓĘNĘ┤üąą×ķū„×ķ▌ö╚ļŻ¼▌ö│÷ė├æ¶Ą─Ę┤ü╠žš„ĪŻ╚╗║¾Ż¼Feature Interaction Module▀Mę╗▓Į┐╝æ]ė├æ¶Ą─Ųõ╦³╠žš„║═╬’ŲĘ╠žš„Ż¼╩╣ė├FMĪóDeep║═Wideīė▀Mąą╠žš„Į╗╗źĪŻūŅ║¾Ż¼▌ö│÷īė╩╣ė├CTRū„×ķė¢ŠÜ─┐ś╦ĪŻłD2Įo│÷┴╦DFNĄ─š¹¾wĮYśŗĪŻ
deep feedback interaction module╩Ū─Żą═Ą─ų„ę¬äōą┬³cĪŻ╦³░³└©┴╦ā╔éĆĮM│╔▓┐ĘųŻ║Internal Feedback Interaction Component║═External Feedback Interaction ComponentĪŻłD3Įo│÷┴╦deep feedback interaction moduleĄ─ĮYśŗĪŻ
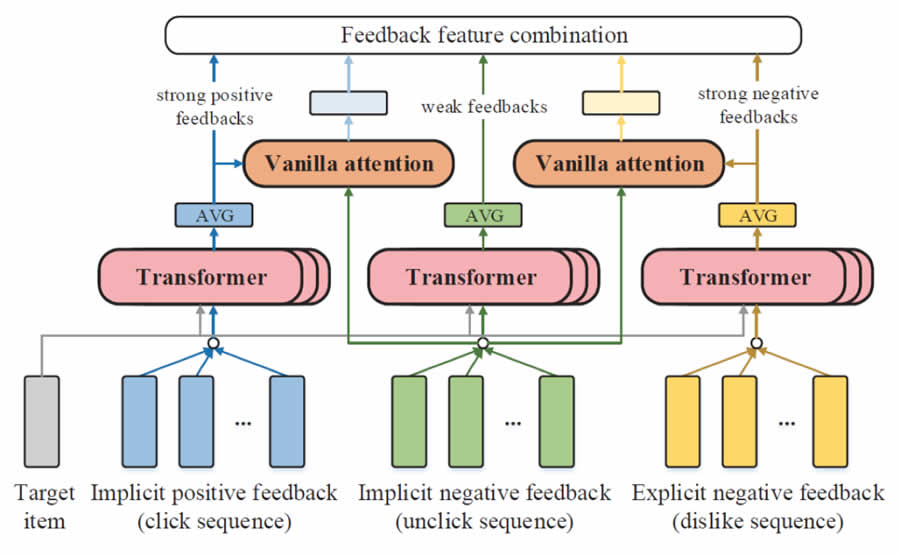
╩ūŽ╚Ż¼į┌Internal Feedback Interaction ComponentųąŻ¼ė├æ¶Ą─ļ[╩Įš²Ę┤üĪóļ[╩ĮžōĘ┤ü║═’@╩ĮžōĘ┤üą“┴ą║═target itemę╗ŲŻ¼═©▀^ę╗éĆtransformerīėŻ¼Ą├ĄĮ┴╦į┌Ė„éĆą“┴ąā╚▓┐╝Ü┴ŻČ╚Ą─item-levelĄ─Į╗╗źą┼ŽóŻ¼╚╗║¾Įø▀^averageīėĄ├ĄĮ╚²ĘNĘ┤üĄ─╠žš„▒Ē╩ŠŻ¼Ųõųąļ[╩Įš²Ę┤ü╠žš„ųą╠N║¼Ė▀┘|┴┐Ą─ė├涚²Ž“Ų½║├Ż¼’@╩ĮžōĘ┤ü╠žš„ųą╠N║¼Ė▀┘|┴┐Ą─ė├涞ōŽ“Ų½║├ĪŻ
Ą┌Č■▓ĮŻ¼į┌External Feedback Interaction ComponentųąŻ¼ļ[╩ĮžōĘ┤üą“┴ą═∙═∙╩Ū╚²ĘNąą×ķųąūŅČÓĄ─ąą×ķŻ¼Ą½ę▓╩Ūįļ┬ĢūŅ┤¾Ą─ąą×ķĪŻū„š▀░čĖ▀┘|┴┐Ą─║═target itemĮ╗╗ź║¾Ą─ļ[╩Įš²Ę┤ü╠žš„║═’@╩ĮžōĘ┤ü╠žš„┐┤ū„ę╗ĘNĖ▀┘|┴┐ųĖī¦Ż¼Å─ė├æ¶╬┤³cō¶ą“┴ąųą═┌Š“ė├æ¶╗“įSŽ▓Üg/▓╗Ž▓ÜgĄ─╬’ŲĘŻ¼ča│õė├æ¶Ą─š²Ž“žōŽ“Ų½║├ĪŻū„š▀╩╣ė├┴╦ę╗éĆattentionīėĄ├ĄĮ┴╦ā╔ĘNė├æ¶╚§š²Ž“/žōŽ“Ę┤ü╠žš„ĪŻ▀@ā╔ĘN╚§Ę┤ü╠žš„║═Ą┌ę╗▓ĮĄ─╚²ĘNĘ┤ü╠žš„Ų┤Įė║¾│╔×ķūŅĮKĄ─ė├æ¶Ę┤ü╠žš„ĪŻ
Ą┌╚²▓ĮŻ¼į┌Feature Interaction ModuleųąŻ¼ū„š▀╩╣ė├┴╦FMĪóWide║═DeepīėŻ¼ī”ė├æ¶Ųõ╦³╠žš„Īó╬’ŲĘ╠žš„║═ė├æ¶Ę┤ü╠žš„Ą╚▀MąąĄ═ļA/Ė▀ļA╠žš„Į╗╗źĪŻ▀@ę╗éĆ─ŻēK╩Ū×ķ┴╦│õĘų└¹ė├Ė„ĘN╠žš„▌oų·═Ų╦]Ż¼╩╣Ą├─Żą═į┌šµīŹ╣żśI╝ē╚╬äš╔Ž▀_ĄĮūŅ║├Ą─ą¦╣¹ĪŻ╩╣ė├Wideīėų„ę¬╩Ū×ķ┴╦ĮoØōį┌Ą─╠žš„╣ż│╠┴¶Ž┬Įė┐┌ĪŻ
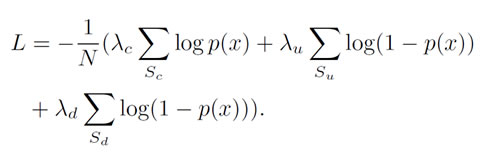
ūŅ║¾Ż¼ū„š▀╗∙ė┌CTR loss▀Mąąė¢ŠÜĪŻ│²╚źé„ĮyĄ─š²└²║═╬┤³cō¶žō└²Ż¼ū„š▀▀Ćį÷╝ė┴╦ę╗ĒŚŅA£yė├涞ōĘ┤ü³cō¶Ą─lossĪŻė╔ė┌į┌īŹļH═Ų╦]ŽĄĮyųąŻ¼ė├æ¶Įo│÷ų„äė’@╩ĮžōĘ┤üĄ─┤╬öĄśO╔┘Ż¼’@╩ĮžōĘ┤üųąĄ─žōŽ“ą┼Žóę▓śOŲõÅŖ┴ęŻ¼╦∙ęįū„š▀å╬¬Üį┌lossųąÅŖš{┴╦▀@ę╗ĒŚŻ¼▓óŪęĮoėĶ┴╦▌^┤¾Ą─ė¢ŠÜÖÓųĄĪŻ
3ĪóīŹ“×ĮY╣¹
ļxŠĆ║═ŠĆ╔ŽīŹ“׊∙į┌╬óą┼┐┤ę╗┐┤╔Ž▀MąąŻ¼ļxŠĆöĄō■╝»░³║¼Ū¦╚f╝ēė├æ¶į┌░┘╚f╝ē╬’ŲĘ╔ŽĄ─ā|╝ēąą×ķĪŻ─Żą═ļxŠĆCTRŅA╣└ĮY╣¹╚ńłD4Ż║
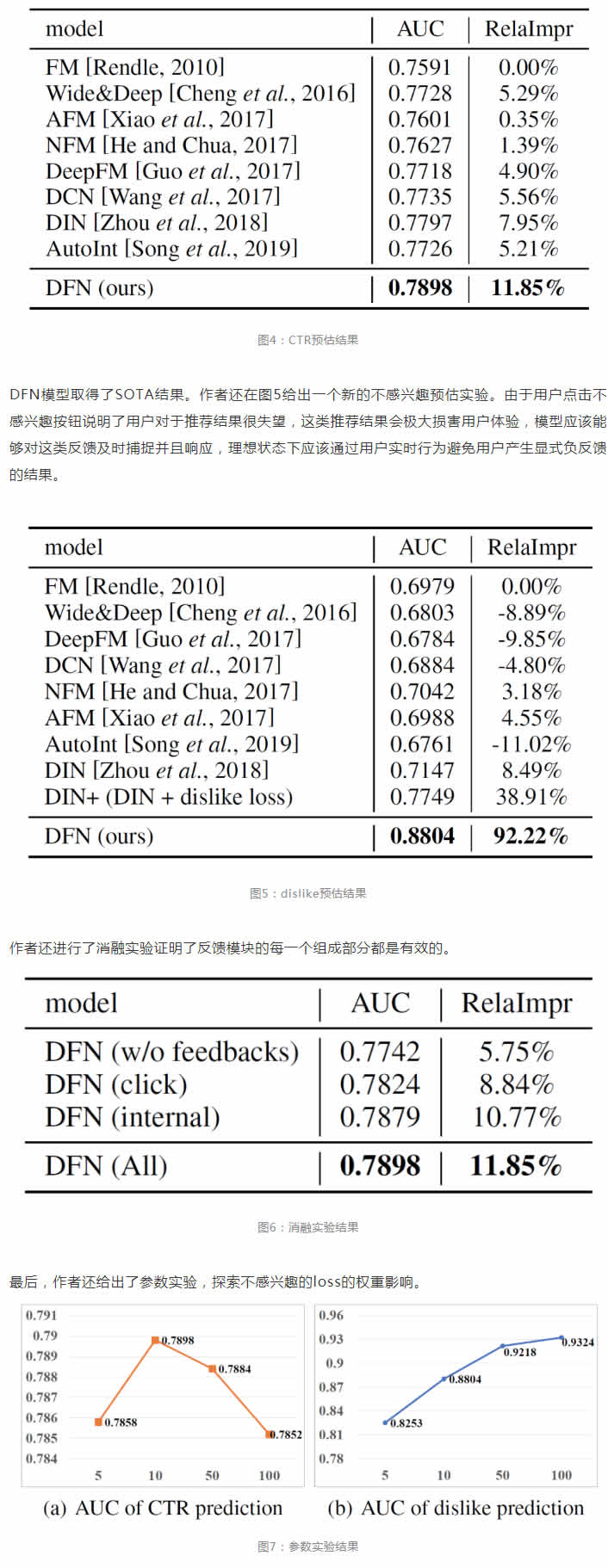
4Īó┐éĮY
į┌▒Š╬─ųąŻ¼ū„š▀│§▓Į蹊┐┴╦═Ų╦]ŽĄĮyųąĄ─ČÓĘN’@╩Į/ļ[╩Į║═š²/žōĘ┤üų«ķgĄ─ģf═¼║Žū„ÖCųŲĪŻDFN─Żą═─▄ē“╗∙ė┌ČÓĘNĘ┤üą┼Žó╝┤ĢrīW┴ĢĄĮė├æ¶Ą─¤oŲ½Ą─š²žōŽ“┼d╚żŻ¼į┌³cō¶ŅA╣└║═▓╗Ėą┼d╚żŅA╣└Ą╚ČÓéĆ╚╬äš╔ŽŠ∙ėą╠ß╔²ą¦╣¹ĪŻų▒ė^Č°ėąą¦Ą──Żą═ę▓╩╣Ą├DFN─▄│╔╣”į┌╣żśI╝ē═Ų╦]ŽĄĮyųąĄ├ĄĮ▓┐╩║═“×ūCĪŻ╬ęéāŅA£yė├æ¶Ą─’@╩ĮĘ┤üŻ¼╠žäe╩Ū’@╩ĮžōĘ┤üĄ─ą┼ŽóīóĢ■╬┤üĒ═Ų╦]ŽĄĮyųąŲĄĮĖ³╝ėųžę¬Ą─ū„ė├Ż¼į┌░lŠ“═Ų╦]ŽĄĮy┐╔ĮŌßīąį═¼Ģr╠ß╔²ė├涾w“×ĪŻ
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |


