

1Īó┐©┐█┴”ą┼╠¢Ęų╬÷
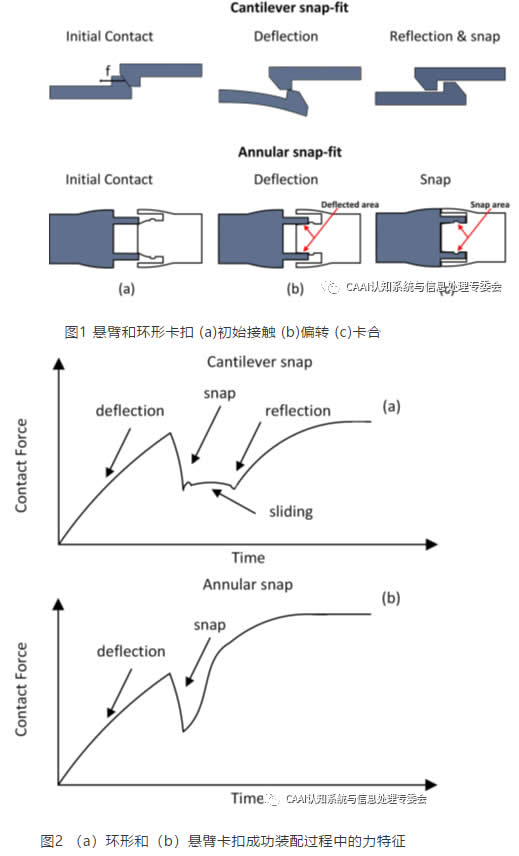
į┌╣żśI╔ŽŻ¼ę╗░ŃĘų×ķ╚²ĘNų„ꬥ─┐©┐█ŅÉą═Ż¼╝┤æę▒█╩Į┐©┐█ĮM╝■ĪóŁhą╬┐©┐█ĮM╝■║═┼ż▐D╩Į┐©┐█ĮM╝■ĪŻ╦³éāė░Ēæ┴Ń╝■įOėŗ║═┐©┐█ÖCśŗŻ¼╦∙ėąŅÉą═Č╝╩ŪŽÓ╦ŲĄ─Ż¼ę“×ķ╦³éā╗∙ė┌Ųõųąę╗éĆ╚ßąį▓┐╝■║═Ą┌Č■éĆĖ▀äéČ╚Ą─▓┐╝■Ż¼║¾š▀į╩įSīóā╔éĆ▓┐╝■▓Õ╚ļ▓óµiČ©į┌ę╗Ų[1]ĪŻ▀@ā╔éĆ▓┐ĘųŽÓ╗ź═ŲäėŻ¼ī¦ų┬╚ßąį▓┐╝■░l╔·Ų½▐DŻ¼ų▒ĄĮ╩®╝ėĄ─┴”│¼▀^ę╗Č©Ž▐Č╚Ż¼Å─Č°ī¦ų┬ā╔éĆ▓┐╝■öÓ┴čĪŻ╦³éāĄ─ģ^äeį┌ė┌µiČ©ÖCśŗĄ─ą╬ĀŅ║═«a╔·▓╗═¼┴”╠žš„Ą─▓─┴Ž╠žąįĪŻæę▒█║═Łhą╬ā╔ĘN┐©┐█ĮM╝■ŅÉą═┐©┐█Ż©łD1Ż®į┌│╔╣”čb┼õ▀^│╠ųą«a╔·Ą─┴”╠žš„Ż©łD2Ż®╚ńŽ┬łD╦∙╩ŠĪŻ
į┌æę▒█┐©┐█čb┼õ▀^│╠ųąŻ¼ę╗Ą®ę¦║Ž│╔╣”Ż¼╚ßąį▓┐╝■Š═Ģ■Ų½▐DŻ¼╗žĄĮŲõ│§╩╝╬╗ų├ī”Ųõ▀MąąµiČ©Ż¼ų╗ėą└Łäė╚ßąį▓┐╝■Ģr▓┼─▄īó▀@ā╔éĆ▓┐╝■ĘųļxĪŻī”Łhą╬┐©┐█Č°čįŻ¼ę¦║Žą¦╣¹ė╔╩®╝ėį┌╚ßąį▓┐╝■╔ŽĄ─║ŃČ©▌d║╔øQČ©ĪŻę╗Ą®▌d║╔Ž¹╩¦Ż¼┐©┐█Š═Ģ■╦╔ķ_ĪŻ┼ż▐D┐©┐█į┌µiČ©▀\äėĘĮ├µėą╦∙▓╗═¼Ż¼ā╔éĆ▓┐╝■ų«ķgĄ─µiČ©▀\äė╩Ūą²▐DĄ─Ż¼Ą½«a╔·Ą─┴”╠žš„┼cŁhą╬║═æę▒█ŽÓ╦ŲĪŻ
┴Ń╝■į┌▓╗═¼Ą─čb┼õļAČ╬«a╔·Ą─ū„ė├┴”┐╔ė├ė┌├Ķ╩÷▀^│╠ĀŅæBĪŻłD2╦∙╩ŠĄ─ā╔ĘN┐©┐█Ą─┴”╠žš„łDŠ▀ėą▓╗═¼Ą─ą╬ĀŅŻ¼┐╔ė├ė┌╝░ĢrūRäečb┼õ▀^│╠Ą─═Ļ│╔ŪķørĪŻį┌▀@ā╔ĘNŪķørŽ┬Ż¼╬’¾wĄ─Ų½▐DČ╝Ģ■«a╔·ę╗éĆ║ŃČ©Ą─┴”Ż¼ę╗Ą®▓┐╝■Ą─┴”Ž¹╩¦Ż¼┴”Š═Ģ■╝▒äĪŽ┬ĮĄŻ¼«öā╔▓┐ĘųµiČ©į┌ę╗ŲĢrŻ¼┴”Š═Ģ■į÷┤¾ĪŻæę▒█┐©┐█į┌µiČ©ų«Ū░Ż¼ā╔éĆ▓┐╝■ŽÓ╗ź╗¼äėŻ¼«a╔·ę╗éĆ║ŃČ©Ą──”▓┴┴”Ż¼įō─”▓┴┴”ė╔ė┌▓┐╝■Ą─▓─┘|ī┘ąįįņ│╔Ą─┴”▌d║╔▓╗═¼Č°ūā╗»ĪŻŁhą╬┐©┐█ät▓╗┤µį┌╗¼äėĪŻ┴”ą┼╠¢Ą─┤_Ūąą╬ĀŅ╚ĪøQė┌▀BĮė▓┐╝■Ą─ÖCąĄąį─▄║═┐©┐█ŅÉą═ĪŻŁhą╬║═æę▒█╩Ūā╔éĆśOČ╦ŪķørŻ¼Łhą╬┐©┐█╩Ūį┌║ŃČ©Ą─┴”▌d║╔Ž┬Ż¼Č°æę▒█┐©┐█į┌ę¦║Ž║¾▌d║╔Ž¹╩¦ĪŻ
2ĪóÖCŲ„īW┴Ģ┐“╝▄
╔Ž╩÷Ęų╬÷▒Ē├„Ż¼╦∙ėąŅÉą═Ą─┐©┐█Č╝Ģ■«a╔·ŽÓ╦ŲĄ½▓╗═¼Ą─čb┼õ┴”╠žš„Ż¼ęį┤_šJūŅĮKĄ─┐©┐█ĀŅæBĪŻ─┐Ū░┤¾ČÓČ╝╩Ū═©▀^Š▀¾w─Żą═Ęų╬÷ĘĮĘ©Ż¼▀@ąĶę¬┤¾┴┐Ą─Ģrķg║═Š½┴”Ż¼Č°Ūę┐╔ųžė├ąįėąŽ▐ĪŻę“┤╦Ż¼▒Š╬─Č©┴x┴╦ę╗éĆÖCŲ„īW┴Ģ┐“╝▄Ż¼įō┐“╝▄┐╔ęįūRäe╦∙ėąŅÉą═Ą─┐©┐█Ą─┴”▌å└¬╠žš„ĪŻ×ķ┴╦▀Mę╗▓Į╝ė╦┘▀@ę╗▀M│╠Ż¼įō┐“╝▄▓╔ė├┴╦╚╦ÖCģfū„Ą─ĘĮ╩ĮüĒ╝ė╦┘īŹ“×▀^│╠Ż¼╔·│╔Š▀ėąĖ▀┐╔ūāąį║═£╩┤_īW┴ĢĮY╣¹Ą─öĄō■╝»ĪŻ
ų╗ėąśŗĮ©ę╗éĆ║├Ą─ė¢ŠÜ║═£yįć╝»Ż¼▓┼─▄Į©┴óę╗éĆ║├Ą─ĘųŅÉŲ„[2]ĪŻę╗éĆŠ▀ėąĮyėŗ¬Ü┴óśė▒Š╠žš„Ą─ė¢ŠÜ╝»▓ó▓╗╚▌ęūĮ©┴óŻ¼╠žäe╩Ū«öąĶę¬═©▀^ÖCŲ„╚╦īŹ“׫a╔·ĢrĪŻę╗ĘĮ├µŻ¼╔·│╔▀@ā╔éĆ│╠ą“╝»ŅÉ╩Š└²┐╔─▄¤oĘ©▀_ĄĮ╩╣ė├╗∙ė┌öĄō■Ą─ĘĮĘ©Ą──┐Ą─Ż¼ūŅĮKĄ─śė▒Šę▓▓╗┐╔─▄║Ł╔w╦∙ėąŪķørĪŻ┴Ēę╗ĘĮ├µŻ¼╚╦ŅÉīŻ╝ęļm╚╗ōĒėąįOėŗ║═Į╗ĖČ┤¾┴┐ūā╗»Ą─īŹ“ץ─ų¬ūRŻ¼Ą½╩Ūø]ėą│õĘųĄ─£╩éõĢrķgĪŻ╚╦ŅÉėąę╗ĘN┼c╔·ŠŃüĒĄ─┐╔ūāąįŻ¼į╩įSśŗĮ©ę╗éĆžSĖ╗Ą─ą┼ŽóöĄō■╝»Ż¼Å─Č°Ė─╔ŲÖCŲ„īW┴ĢĄ─ą¦╣¹ĪŻ▀@ę╗³cŻ¼╝ė╔Ž╚╦ģó┼cčb┼õ▀^│╠╦∙╣Ø╩ĪĄ─┤¾┴┐ĢrķgŻ¼Č╝’@╩Š┴╦╚╦ÖCģfū„Ą─ā×ä▌ĪŻ╔Ž╩÷ā╚╚▌░³║¼į┌łD3╦∙╩ŠĄ─öMūhĄ─┐“╝▄ųąŻ¼ŲõųąČ©┴x┴╦ā╔éĆļx╔óļAČ╬Ż║ė¢ŠÜ║═▓┘ū„ļAČ╬ĪŻ
ė¢ŠÜļAČ╬Ą──┐Ą─╩Ū╔·│╔ę╗éĆ─▄ē“īŹĢr£╩┤_▒Ēš„┴”ą┼╠¢Ą─ĘųŅÉŲ„ĪŻį┌▀@ę╗ļAČ╬Ż¼čb┼õ╩Ūģfū„═Ļ│╔Ą─Ż¼ŲõųąÖCŲ„╚╦─├ų°ā╔éĆ┴Ń╝■ųąĄ─ę╗éĆ│õ«öųŪ─▄é„ĖąŲ„Ż¼Č°╚╦ŅÉätū„×ķīŻ╝ę▀Mąą╩ųäėčb┼õĪŻį┌╚╦ÖCģfū„ųąŻ¼ąĶę¬ę╗éĆ┐╔ęį╣└ėŗ╗“£y┴┐Ą─┴”Ż¼Č°▓╗ąĶę¬ÖCŲ„╚╦Ą─┴”é„ĖąŲ„╗“═Ō▓┐Ą─ęĢėXŽĄĮyŻ¼Å─Č°ĮĄĄ═┴╦│╔▒Š║═Å═ļsąįĪŻšō╬─š╣╩Š┴╦įSČÓ│╔╣”║═╩¦öĪĄ─čb┼õ└²ūėŻ¼į┌Ė„ĘN▓╗═¼Ą─Śl╝■Ž┬ęį▓╗═¼Ą─╦┘Č╚▀Mąą┴╦č▌╩ŠĪŻ
3Īó╠žš„▀xō±
╚ńłD2╦∙╩ŠŻ¼┐©┐█čb┼õ┐╔ęįĖ┼└©×ķį┌Ģrķgą“┴ą╔Ž┴”╠žš„Ą─¬Ü╠ž▒Ē╩ŠĪŻŽÓ▒╚ų«Ž┬Ż¼▓╗│╔╣”Ą─Ūķør┐╔─▄Ģ■ėą║▄┤¾Ą─▓╗═¼Ż¼ę“┴”▓╗ūŃī¦ų┬▓┐╝■Õe╬╗«a╔·įļ┬Ģą┼╠¢Ż¼ī¦ų┬┴”╔Ž╔²Č°▓╗│÷¼F├„’@Ą─Ž┬ĮĄĪŻ┐©┐█ĮM╝■Ą─┴”ą┼╠¢┼c┴Ń╝■Ą─▓─┴Ž║═µiČ©ÖCśŗėąĻPĪŻė╔ė┌Ą═Ņl┴”ą┼╠¢į┌ŲõŅlūVųą’@╩ŠĄ─ą┼Žó║▄╔┘Ż¼ę“┤╦╗∙ė┌Ņl┬╩Ą─╠žš„▓╗▒╗┐╝æ]ĪŻ╩ūŽ╚▀xō±┴╦24éĆ╠žš„▓ó▀Mąąėŗ╦ŃŻ¼ęį▀Mę╗▓Įįu╣└ŲõūRäe┐©┐█čb┼õĄ──▄┴”ĪŻĮyėŗĄ─ą┼╠¢╠žš„░³└©ą┼╠¢─▄┴┐ĪóŲ½▓ŅČ╚ĪóĘĮ▓ŅĪóī”öĄūāōQĪóĘÕČ╚║═Willisonš±Ę∙Ą╚ĪŻ×ķ┴╦▒▄├Ō▀^Č╚öM║ŽŻ¼ĮĄĄ═ĘųŅÉŲ„Ą─Å═ļsČ╚Ż¼ĮĄĄ═ī”┤¾ą═ė¢ŠÜ╝»Ą─ę¬Ū¾Ż¼ĮĄĄ═╦ŃĘ©Ą─Å═ļsČ╚ĪŻė╔ė┌╠žš„Ž“┴┐Ą─│§╩╝│▀┤ń▌^ąĪŻ¼▓╔ė├┴╦ę╗ĘNĖF┼e╦č╦„ūė╝»Ą─▀xō±ĘĮĘ©Ż¼Š▀ėą▌^Ė▀Ą─ąį─▄Ż©Š½Č╚>0.95Ż®[3]ĪŻī”ė┌ūŅĮKĄ─╠žš„▀xō±Ż¼┐╝æ]┴╦├┐éĆ╠žš„Ą─ėŗ╦ŃÅ═ļsČ╚ĪŻ
4ĪóīŹ“×ĮY╣¹
ū„š▀▀Mąą┴╦┤¾┴┐Ą─īŹ“×üĒĘų╬÷╦∙╠ß│÷Ą─┐“╝▄Ż¼▓óī”Ųõį┌ā╔éĆļAČ╬Ą─ą¦┬╩▀Mąą┴╦įu╣└ĪŻ╩ūŽ╚ĮķĮBīŹ“×čbų├Ż¼╚╗║¾ĮķĮBöĄō■▓╔╝»▀^│╠║═īŹ“×ĮY╣¹ĪŻīó7ūįė╔Č╚Ą─KUKA LWR4+ÖCąĄ╩ų┼c╚²ųĖŖA│ųŲ„Barret BH-8▀BĮėŻ¼▓ó╩╣ė├╠žųŲŖA│ųŲ„▀Mąąįu╣└ĪŻ▀xō±┴╦ā╔ĮM▓╗═¼Ą─▓┐╝■Ż©łD4Ż®Ż¼┤·▒Ēæę▒█║═Łhą╬┐©┐█ĮM╝■ĪŻį┌▓╗╩╣ė├═Ō┴”é„ĖąŲ„Ą─ŪķørŽ┬Ż¼═©▀^KUKA┴”╣└╦ŃÖCųŲ£y┴┐ā╔éĆ▓┐╝■ų«ķg«a╔·Ą─čb┼õ┴”ĪŻ
ī”ė┌æę▒█┐©┐█Ż¼▓ÕŅ^Ą─═ŌĮė▓┐Ęų░▓čbį┌Č©ųŲĄ─ŖAŃQ╔ŽŻ©łD5Ż®ĪŻ╚╗║¾─Ė┴Ń╝■▒╗╣╠Č©į┌ę╗éĆĘĆČ©Ą─╗∙ū∙╔ŽŻ¼ė╔ÖCŲ„╚╦▀Mąąūįų„čb┼õĪŻßśī”æę▒█║═Łhą╬┐©┐█čb┼õČ╝▀Mąą┴╦Ęų╬÷Ż¼ęįįu╣└æę▒█║═Łhą╬┐©┐█čb┼õĄ─▀xō±╠žš„ĪŻ╩ūŽ╚Ż¼Ė∙ō■ė¢ŠÜļAČ╬╩š╝»ĄĮĄ─öĄō■╝»Ż¼įu╣└╦∙╠ß│÷Ą─╠žš„║═ė¢ŠÜĘųŅÉŲ„Ą─ą¦╣¹ĪŻ╚╗║¾Ż¼æ¬ė├š¹éĆ┐“╝▄ęį╠ßĖ▀Ųõš¹¾wą¦┬╩ĪŻ
╩š╝»┴╦╦─éĆ▓╗═¼Ą─öĄō■╝»Ż¼Ųõųąā╔éĆ╩Ū═©▀^╚╦ÖCģfū„╩š╝»Ą─Ż¼┴Ē═Ōā╔éĆ╩Ūį┌ÖCŲ„╚╦ūįų„▓┘ū„Ģr╩š╝»Ą─ĪŻį┌├┐ĘNŪķørŽ┬Ż¼Č╝ėąę╗░ļĄ─│╠ą“╝»│╔╣”═Ļ│╔čb┼õŻ¼┴Ēę╗░ļät╬┤─▄═Ļ│╔čb┼õĪŻė╔ė┌┴Ń╝■╬┤ī”£╩╗“╦∙ąĶ┴”▓╗ūŃŻ¼Ģ■«a╔·ā╔ĘN▓╗═¼ŅÉą═Ą─▓╗│╔╣”┐©┐█čb┼õĄ─ŪķørĪŻūŅ║¾Ż¼×ķ┴╦£yį湦╣¹Ż¼ÖCŲ„╚╦čb┼õ╩Ūį┌╦─ĘN▓╗═¼Ą─ŲĮŠ∙╦┘Č╚Ž┬═Ļ│╔Ą─ĪŻ
ĮY╣¹▒Ē├„Ż¼į┌ė¢ŠÜ╝»ŽÓī”▌^ąĪĄ─ŪķørŽ┬Ż¼═©▀^╚╦ÖCģfū„╠ß╚ĪĄ─ĘųŅÉŲ„─▄ē“½@Ą├║▄║├Ą─ūRäeą¦╣¹ĪŻąĶę¬ūóęŌĄ─╩ŪŻ¼«öš¹éĆė¢ŠÜ╝»ė├ė┌ĘųŅÉŲ„Ą─ė¢ŠÜĢrŻ¼æę▒█║═Łhą╬┐©┐█Ą─Š½Č╚Ęųäe▀_ĄĮ0.96║═0.98ĪŻ╝┤╩╣╩Ūė¢ŠÜ╝»Ą─ę╗ąĪ▓┐ĘųŻ¼ĘųŅÉŲ„Ą─ąį─▄ę▓ĘŪ│Ż║├Ż¼į┌ų╗ėąN=20║═N=22éĆśė▒ŠĢrŻ¼ĘųŅÉŲ„Ą─ųąųĄ▀_ĄĮ┴╦0.9ĪŻ┴Ēę╗éĆųžę¬Ą─ė^▓ņĮY╣¹╩ŪŻ¼«öė¢ŠÜ╝»ęÄ─Żį÷┤¾ĢrŻ¼Š½Č╚«É│ŻųĄÄū║§×ķ┴ŃŻ¼ĘĮ▓Ņ’@ų°Ž┬ĮĄŻ¼’@╩Š┴╦ĮY╣¹ĮyėŗĄ─’@ų°ąįĪŻ
▀\ąąįu╣└ĪŻįu╣└┴╦╦∙╠ß│÷Ą─┐“╝▄Ą─š¹¾wą¦─▄Ż¼ęįīŹĢrĮė╩šĮM╝■čb┼õą┼╠¢ĪŻĮY╣¹▒Ē├„Ż¼įōĘĮĘ©Š▀ėą┴╝║├Ą─ūRäeąį─▄Ż¼┼c╚½ė¢ŠÜ╝»ŽÓ╦ŲŻ¼£╩┤_Č╚Īó╠ž«Éąį║═ņ`├¶Č╚Š∙║ŌŻ¼ŲĮŠ∙ųĄĘųäe×ķ0.92Īó0.981║═0.86ĪŻ▀@ą®ĮY╣¹▒Ē├„┼cš¹éĆöĄō■╝»Ż©N=60Ż®ė¢ŠÜĄ─ĘųŅÉŲ„ąį─▄ŽÓ▒╚Ż¼įōĘųŅÉŲ„ąį─▄Ą─ŽÓī”ūā╗»▌^ąĪŻ¼Ęųäe×ķ7%Īó0.08%║═0.14%ĪŻ╚╗Č°Ż¼ĮY╣¹Ģ■ļSų°ė¢ŠÜ╝»ęÄ─ŻĄ─▓╗═¼Č°ūā╗»Ż¼įōė¢ŠÜ╝»░³║¼║▄ČÓ«É│ŻųĄŻ¼ŅÉ╦Ųė┌łD6╦∙╩ŠĄ─ĘųŅÉŲ„Ą─ĮY╣¹ĪŻę“┤╦Ż¼×ķ┴╦┐╦Ę■┤╦ŅÉå¢Ņ}Ż¼æ¬ūą╝Ü╠¶▀xė¢ŠÜ╝»Ż¼ęį▒Ńį┌│╔╣”║═╩¦öĪĄ─ŪķørŽ┬░³║¼╦∙ėąą┼╠¢ūā╗»ĪŻ
▐DōQįu╣└ĪŻ▀@ā╔ĘNĘųŅÉŲ„ī”│╔╣”Ą─┐©┐█čb┼õą┼╠¢Š▀ėą║▄Ė▀Ą─ĘųŅÉŠ½Č╚ĪŻī”▓╗│╔╣”ą┼╠¢Ą─ĘųŅÉŠ½Č╚▌^Ą═Ż¼╠žš„ųĄĘųäeŽ┬ĮĄĄĮ0.673║═0.715ĪŻįōĘųŅÉŲ„Ą─┐é¾wąį─▄ė├ŲĮ║ŌŠ½Č╚üĒ▒Ē╩ŠŻ¼ā╔ĘNŪķørŽ┬Ęųäe×ķ0.836║═0.857ĪŻ▒M╣▄ĘųŅÉŲ„Š▀ėąŽÓī”▌^║├Ą─ŲĮ║ŌŠ½Č╚Ż¼Ą½Ųõ╠ž«ÉČ╚ĘŪ│ŻĄ═Ż¼▀@▒Ē╩Š▓╗│╔╣”Ą─čb┼õ║▄╚▌ęū▒╗ūRäe×ķ│╔╣”čb┼õĪŻ
▓╗┐╔ęŖī”Ž¾Ą─ŠC║ŽįuārĪŻį┌▀@ę╗▓┐ĘųųąŻ¼ī”╦∙╠ß│÷Ą─ĘĮĘ©ė├ė┌Ė┼└©▓╗═¼ī”Ž¾Ą─š¹¾w─▄┴”▀Mąą┴╦įu╣└ĪŻŁhą╬┐©┐█═©▀^╚╦ÖCģfū„į┌öĄō■╝»╔Žė¢ŠÜ«a╔·Ą─ĘųŅÉŲ„Ż¼ė├ė┌ūRäe┴Ēę╗ĘNŁhą╬┐©┐█ŅÉą═Ą─┐©┐█ĮM╝■Ż¼į┌ÖCŲ„╚╦ūįų„▓┘ū„Ž┬▀Mąąčb┼õŻ©łD7Ż®ĪŻ▒M╣▄▀@ā╔éĆī”Ž¾▓╗═¼Ż¼Ą½╦³éāėąŽÓ╦ŲĄ─ę¦║ŽÖCųŲ▓ó╔·│╔ŽÓ╦ŲĄ─┴”┼õų├╬─╝■ĪŻ╚╗Č°Ż¼▓╗┐╔ęŖĄ─╬’¾wėąĖ³ć└Ė±Ą─┴”īWÖCųŲŻ¼▓óŪęę¦║Ž░l╔·į┌▌^┤¾Ą─┴”š±Ę∙ųąŻ¼ŲĮŠ∙ę¦║ŽųĄ×ķ45 NĪŻį┌įu╣└▀^│╠ųąŻ¼╩š╝»┴╦30┤╬ę¦║Ž┴”Ų╩├µŻ¼├┐éĆ▓┐╝■ėą15éĆą┼╠¢Ż©│╔╣”║═╩¦öĪŻ®ĪŻįōĘųŅÉŲ„ęįīŹĢrĘĮ╩Įī”ą┼╠¢▀Mąą╠Ä└ĒŻ¼═¼Ģrą┼╠¢į┌ė¢ŠÜ╝»Ą─╣▄└Ēå╬į¬╝ēäe╔ŽöUš╣▓óį┌200msĢrķg┤░┐┌ųą▓╔śėĪŻĮY╣¹▒Ē├„Ż¼ī”╦∙ėą│╔╣”Ą─čb┼õ▓┐╝■║═265éĆ▓╗│╔╣”Ą─┐©┐█čb┼õ▓┐╝■ųąĄ─191éĆ▓┐╝■▀Mąą┴╦š²┤_Ą─ĘųŅÉŻ¼ŲĮŠ∙Š½Č╚▀_ĄĮ0.8604Ż©72.08%╠ž«ÉąįŻ®ĪŻ═¼Ģrī”ļxŠĆŪķørŻ©╚½ą┼╠¢ĘųŅÉŻ®ę▓▀Mąą┴╦įu╣└ĪŻš¹¾w£╩┤_Č╚×ķ0.9Ż¼ 15éĆčb┼õ╩¦öĪą┼╠¢ųąĄ─12éĆŻ©80%╠ž«ÉąįŻ®▒╗ūRäe│÷Ż¼╦∙ėą│╔╣”┐©┐█čb┼õ▓┐╝■ą┼╠¢Č╝▒╗ūRäe│÷üĒĪŻĮY╣¹▒Ē├„Ż¼įōĘĮĘ©¤oąĶųžą┬ė¢ŠÜŻ¼┐╔ęį║▄║├Ąž═ŲÅVĪŻ
įōĘĮĘ©┼c═©▀^Š▀¾w─Żą═Ęų╬÷ĘĮĘ©▀Mąą┴╦▀Mę╗▓ĮĄ─▒╚▌^[4]ĪŻįō┐“╝▄╩Ū┼c┴Ēę╗┐“╝▄į┌═¼ę╗éĆöĄō■╝»ųą═Ļ│╔Ą─ĪŻ▀@éĆöĄō■╝»ė╔33éĆčb┼õļŖ▀BĮėŲ„Ą─┴”ą┼╠¢ĮM│╔Ż¼Ųõųą9éĆī┘ė┌│╔╣”čb┼õĄ─▓┐╝■Ż¼Č°ŲõėÓĄ─ī┘ė┌▓╗═¼ŅÉą═Ą─Õeš`čb┼õ▓┐╝■ĪŻ×ķ┴╦įu╣└įō┐“╝▄Ż¼īó▓╗═¼ŅÉäeĄ─▓╗│╔╣”Ą─öĄō■║Ž▓óį┌ę╗ŲŻ¼īóöĄō■╝»▓Ęų×ķę╗éĆė¢ŠÜ╝»Ż©60%Ż®║═ę╗éĆ£yįć╝»Ż©40%Ż®ĪŻė├╗∙ė┌─Żą═Ą─ĘĮĘ©Ą├│÷╦─ĘN▓╗═¼ŅÉäeĄ─Š½Č╚Ż¼ĮY╣¹ŲĮŠ∙Š½Č╚×ķ0.945ĪŻę“×ķįŁ╩╝öĄō■╝»Ą─40%▒╗ė├ė┌“×ūCįōĘĮĘ©Ż¼╦∙ęį¤oĘ©▀MąąĮ^ī”╣½ŲĮĄ─▒╚▌^Ż¼Ą½ĮY╣¹’@╩Šą¦╣¹ŽÓī”▌^║├ĪŻ
5ĪóĮYšō
▒Š╬─╠ß│÷┴╦ę╗ĘN╗∙ė┌ÖCŲ„īW┴ĢĄ─┐ņ╦┘čb┼õĄ─┐“╝▄ĪŻįō┐“╝▄į┌ā╔ĘN▓╗═¼Ą─┐©┐█čb┼õŽ┬▀Mąą┴╦£yįćŻ¼’@╩Š│÷▌^Ė▀Ą─ūRäeŠ½Č╚Ż©Ė▀▀_0.99Ż®ĪŻ═©▀^╚╦ÖCģfū„ė¢ŠÜ«a╔·┴╦┴╝║├Ą─īW┴ĢöĄō■╝»Ż¼│╔╣”║═╩¦öĪ░Ė└²Ą─┐╔ūāąįČ╝║▄Ė▀ĪŻįō╠žš„╝»ī”▓╗═¼Ą─ī”Ž¾ųą▀Mąą┴╦£yįćŻ¼’@╩Š╦³į┌▓╗═¼Ą─┐©┐█čb┼õŅÉą═ųąĄ──▄┴”ĪŻų╗ę¬ī”öĄō■╝»▀Mąąūą╝ÜĄ─▓╔śėŻ¼╝┤╩╣╩Ū║▄ąĪĄ─N=20éĆśė▒ŠĄ─ė¢ŠÜ╝»Ż¼ĘųŅÉŲ„Ą─ąį─▄ę▓─▄▒Ē¼F│÷┴╝║├Ą─ą¦╣¹Ż¼┐╔▀_Š½Č╚>0.9ĪŻ═¼Ģr┼c╗∙ė┌─Żą═Ą─ĘĮĘ©▀Mąą┴╦▒╚▌^Ż¼ĮY╣¹▒Ē├„┴╦įōĘĮĘ©Ą─’@ų°ā׫ɹįĪŻįō┐“╝▄╬┤üĒīóį┌Ė³ČÓŅÉą═Ą─┐©┐█čb┼õųą▀Mę╗▓Į“×ūCĪŻ
ģó┐╝╬─½I
[1] J. Ji, K.-M. Lee,and S. Zhang, Ī░Cantilever snap-fit performance analysis for haptic evaluation,Ī▒J. Mech. Des., vol. 133, no. 12, 2011, Art. no. 121004.
[2] C. Beleites, U.Neugebauer, T. Bocklitz, C. Krafft, and J. Popp, Ī░Sample size planning forclassification models,Ī▒ Anal. Chim. Acta, vol. 760, pp. 25©C33, Jan.2013.
[3] I. Guyon and A.Elisseeff, Ī░An introduction to variable and feature selection,Ī▒ J. Mach.Learn. Res., vol. 3, pp. 1157©C1182, Jan. 2003.
[4] J. Huang, Y.Wang, and T. Fukuda, Ī░Set-membership-based fault detection and isolation forrobotic assembly of electrical connectors,Ī▒ IEEE Trans. Autom. Sci. Eng., vol.15, no. 1, pp. 160©C171, Jan. 2018. [Online]. Available: http://ieeexplore.ieee.org/document/7572012/
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



