

▒Ŗ╦∙ų▄ų¬Ż¼┴”┴┐Ę┤üėąų·ė┌═Ō┐Ųßt╔·╩╣ė├▀m«öĄ─┴”Č╚üĒ▒▄├ŌĮM┐Śōpé¹Ż¼Č°ĮM┐Śōpé¹═©│Ż╩Ūė╔ė┌ė|ėXĘ┤üĄ─å╩╩¦║═¤oęŌĄ─▀^┤¾Ų„ąĄ┴”Ą─Ė▒«a╬’[5]ĪŻ└²╚ńŻ¼▀_ĘęŲµ╩ųągŽĄĮy(Intuitive Surgical Inc.,Sunnyvale, CA)╩ŪŲ∙Į±×ķų╣Ą┌ę╗éĆ╩ųągÖCŲ„╚╦Ż¼ę▓╩Ū╔╠śI╔ŽūŅ│╔╣”Ą─╩ųągÖCŲ„╚╦ų«ę╗Ż¼Ą½╦³▓╗╠ß╣®┴”╗“ė|ėXĘ┤üĪŻō■ł¾Ą└Ż¼į┌▀_ĘęŲµÖCŲ„╚╦▓┘ū„Ą─╩ųągųąŻ¼ūź╬š┴”īó═©▀^┴”Ę┤ü’@ų°ĮĄĄ═[2]ĪŻ└¹ė├é„ĖąŲ„£y┴┐ė|ėXą┼╠¢┐╔ęį═©▀^į÷╝ė═Ō┐Ųßt╔·Ą─╠ÄŠ│ęŌūRüĒ╠ßĖ▀╩ųągą¦┬╩[2]Ż¼╠žäe╩Ūī”ė┌Ė▀’LļUĄ─╩ųągüĒšfŻ¼╚ńą─┼K║═┤¾─X╩ųąg[6]ĪŻ▀@ĘNė|ėXé„ĖąŲ„æ¬ØMūŃ╠žČ©Ą─╬’└Ē║═╣”─▄ę¬Ū¾ĪŻ▒╚╚ńŻ¼Ž±╩ųągŃQ║═Ķćūė▀@śėĄ─╩ųągŲ„ąĄČ╝ėą║▄ąĪĄ─Ž┬ŅMĪŻę“┤╦Ż¼é„ĖąŲ„æ¬ąĪą═╗»Ż¼ęį▀m║Ž└ĒŽļĄ─╬╗ų├ĪŻ┤╦═ŌŻ¼é„ĖąŲ„æ¬─▄į┌ņoæB║═äėæBŚl╝■Ž┬╣żū„Ż¼╠žäe╩Ū▀\äėŲ„╣┘Ż¼╚ńą─┼K[7]ĪŻ
═¼śėŻ¼═Ō┐Ųßt╔·┐╔─▄ąĶę¬═©▀^│ų└m╩®╝ėņoæB┴”üĒŠS│ųĮM┐ŚĪŻ▀@éĆņoæB┴”į┌ŠS│ųŲ┌ķg▒žĒÜ╩Ū║ŃČ©Ą─ĪŻ═¼ĢrŻ¼×ķ┴╦▒▄├ŌĮM┐Ś╦║┴čŻ¼┴”▓╗─▄│¼▀^ę╗éĆ╠žČ©Ą─ĘČć·ĪŻ╚╗Č°Ż¼ė╔ė┌ĮM┐ŚĄ─š│ÅŚąįŻ¼╣żŠ▀-ĮM┐ŚŽÓ╗źū„ė├┴”┐╔─▄Ģ■ļSų°ĢrķgĄ─═ŲęŲČ°£pąĪ(ę▓ĘQ×ķæ¬┴”╦╔│┌¼FŽ¾)Ż¼ī¦ų┬ĮM┐Ś╗¼ęŲ[8]ĪŻ┴Ēę╗éĆ└²ūė╩Ūį┌┤┼╣▓š±│╔Ž±(MRI)Ž┬▀Mąą╩ųągŻ¼▀@ĘN═Ō┐Ų╩ųągę¬Ū¾é„ĖąŲ„Š▀ėą┤┼╣▓š±╝µ╚▌ąįĪŻ┤╦═ŌŻ¼į┌ę╗ą®╩ųągŻ¼╚ńą─č¬╣▄╬óäō╩ųągųąŻ¼é„ĖąŲ„▒žĒÜ╩ŪļŖ▒╗äėĄ─Ż¼▒▄├ŌĖ╔ö_Ą─ą─┼KĄ─ļŖ╗Ņäė[6]ĪŻ
æ¬ė├ė┌MISĄ─ė|ėXé„ĖąŲ„ų„ę¬╩Ū╗∙ė┌ļŖīW╗“╣ŌīWįŁ└Ēķ_░lĄ─ĪŻłD1’@╩Š┴╦╗∙ė┌é„ĖąįŁ└ĒĄ─MISė|ėXé„ĖąŲ„Ą─ĘNŅÉĪŻ
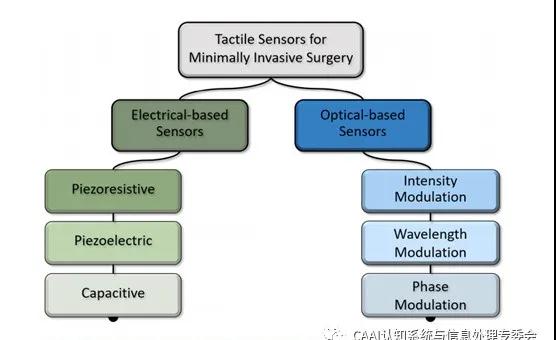
łD1 ė|ėXé„ĖąŲ„ĘųŅÉ
╗∙ė┌ļŖūėĄ─ė|ėXé„ĖąŲ„╩Ū─┐Ū░ūŅ│Żė├Ą─MISé„ĖąĘĮ╩Į[6]ĪŻļŖūėé„ĖąŲ„┐╔ęį▀Mę╗▓ĮĘųŅÉ×ķē║ļŖ╩ĮĪóē║ūĶ╩Į║═ļŖ╚▌╩Įé„ĖąŲ„ĪŻļm╚╗ļŖūėé„ĖąŲ„ØMūŃ┴╦╔Ž├µ╠ߥĮĄ─┤¾ČÓöĄę¬Ū¾Ż¼Ą½╦³╝╚▓╗┼cMRI╝µ╚▌Ż¼ę▓▓╗╩Ū¤oį┤Ą─ĪŻ┤╦═ŌŻ¼ē║ļŖ╩Įé„ĖąŲ„▓╗─▄£y┴┐ņoæB┴”ĪŻĖ▀£■║¾║═╚▒Ę”┐╔ųžÅ═ąį╩Ū▀@ŅÉé„ĖąŲ„Ą─┴Ēę╗éĆ╚▒³cĪŻ┴Ēę╗ĘĮ├µŻ¼╗∙ė┌╣Ō└wĄ─é„ĖąŲ„Š▀ėą╔·╬’ŽÓ╚▌ąįĪó▌p▒Ńąį║═─═Ė»╬gąįĪŻČ°Ūę╣ŌīWé„ĖąŲ„╩Ū¤oį┤Ą─Ż¼┐╔į┌MRIŁhŠ│Ž┬╣żū„[9]ĪŻ▀@ī¦ų┬╣ŌīWé„ĖąŲ„ūŅĮ³ÅVĘ║æ¬ė├ė┌MIS║═RMIS[6]ĪŻ
╣ŌīWé„ĖąŲ„Ą─╣żū„ų„ę¬╗∙ė┌╚²éĆįŁ└Ē:╣ŌÅŖČ╚š{ųŲ(LIM)Ż¼ŽÓ╬╗š{ųŲ(PM) ║═▓©ķLš{ųŲ(WM)[6]ĪŻŽÓ▒╚ų«Ž┬Ż¼╗∙ė┌LIMĄ─é„ĖąŲ„Š▀ėąārĖ±Ą═┴«Īóī”¤ß▓╗├¶ĖąĪóįOėŗ║åå╬Īóęūė┌īŹ¼FĄ╚¬Ü╠žā׳cŻ¼Č°╗∙ė┌PM║═╗∙ė┌WMĄ─é„ĖąŲ„ätąĶę¬ę╗éĆŽÓī”░║┘FĄ─£y┴┐ŽĄĮyüĒėŗ╦Ń┴”║═╬╗ęŲĄ╚╬’└ĒģóöĄĪŻ╗∙ė┌LIMĄ─é„ĖąŲ„Ą─╚▒³c╩ŪŻ¼ąĪą═╗»╚į╚╗╩ŪŽ▐ųŲŲõ┐╔öUš╣ąįĄ─ĻPµIå¢Ņ}ĪŻ▀@ę╗Ž▐ųŲį┌║▄┤¾│╠Č╚╔Žė░Ēæ┴╦Ęų▒µ┬╩║═£y┴┐ĘČć·[10]Ż¼[11]ĪŻ
į┌MISæ¬ė├ųąŻ¼ė|ėXé„ĖąŲ„Ą─įOėŗę¬Ū¾(ėųĘQ╝s╩°Śl╝■)┼cé„ĖąŲ„Ą─╬’└Ē║═╣”─▄╠žąįėąĻPĪŻ╬’└Ē╠žąįų„ę¬╚ĪøQė┌é„ĖąŲ„Ą─ą╬ĀŅ║═┤¾ąĪŻ¼Č°╣”─▄╝s╩°ät┼cé„ĖąŲ„į┌╔·╬’ŁhŠ│ųąĄ─╝µ╚▌ąįĪóŽÓ╗źū„ė├║═ąį─▄ėąĻPĪŻū„×ķ╬’└Ē╝s╩°Ą─ę╗éĆ└²ūėŻ¼MISė|ėXé„ĖąŲ„æ¬įō╩ŪąĪ│▀┤ń║═łAų∙ą╬Ą─Ż¼┐╔į┌ī¦╣▄Ą─╣▄╔Ē╗“╝ŌČ╦╝»│╔ĪŻū„×ķ╣”─▄ę¬Ū¾Ż¼é„ĖąŲ„æ¬įō─▄ē“£y┴┐0-5NĘČć·ā╚Ą─Įėė|┴”Ż¼Ęų▒µ┬╩×ķ0.01N [12]ĪŻ┤╦═ŌŻ¼é„ĖąŲ„欎ӫö├¶ĖąĪóŠĆąįĪóĄ═£■║¾ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



