
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
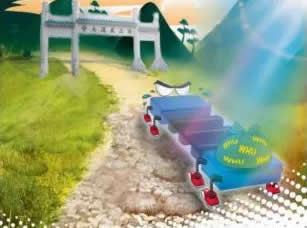
Į³╚šŻ¼╬õØh┤¾īWč”²łĮ©Į╠╩┌łFĻĀčąųŲ│÷ę╗ĘN├į─Ń▄ø¾wÖCŲ„╚╦Geca-RobotŻ¼Ųõ┐╔Š½£╩┐žųŲĘĮŽ“║═╦┘Č╚Ż¼┐╔į┌ÅUąµ¬M┐pĪó╔·╬’¾wā╚═Ļ│╔Ė„ĘNÅ═ļsū„śIĪŻŽÓĻPšō╬─ęč░l▒Ēį┌▓─┴ŽŅIė“ėó╬─Ų┌┐»Materials TodayŻ©ĪČĮ±╚š▓─┴ŽĪĘŻ®╔ŽĪŻŲõšō╬─Ņ}×ķĪ░Bioinspiredfooted soft robot with unidirectional all-terrain mobilityĪ▒Ż©ĪČŠ▀éõČ©Ž“╚½Ąžą╬▀\äė─▄┴”Ą─Ę┬╔·ėąūŃ▄ø¾wÖCŲ„╚╦ĪĘŻ®ĪŻįō蹊┐Ą├ĄĮć°╝ęųž³cčą░lėŗäØĒŚ─┐║═ć°╝ęūį╚╗┐ŲīW╗∙ĮĄ─ų¦│ųĪŻ
ō■ĮķĮBŻ¼Geca-RobotķL2cmĪóųž0.3gĪó╔ĒČ╬╚ß▄øņ`╗ŅŻ¼ęįĘ┬▒┌╗óäé├½Ą─╬ó├ū╚²└Ōų∙Ļć┴ąū„×ķĪ░─_Ī▒Ż¼ęįĮ╗╠µ┼┼┴ąĄ─═Ė├„PDMSŚlĦ║═╩»─½Ž®/PDMSÅ═║Ž▓─┴ŽŻ©GPŻ®ŚlĦĮM│╔Ī░╝Ī╚ŌĪ▒ĪŻŲõ▓ĮæBĮĶĶb┴╦▒┌╗ó─_Ą─╚ĪŽ“żĖĮ─▄┴”║═│▀¾ČŪ░║¾ūŃĮ╗╠µ▀\äė─Ż╩ĮŻ¼┐╔ęįīŹ¼Fį┌Ė▀▀_30Č╚Ų┬Č╚Ą─╣Ō╗¼▒Ē├µĘĆČ©═Ż▓┤Č°▓╗░l╔·╗¼ęŲŻ¼▓ó┐╔ęįį┌╣ŌššŽ┬▀Mąą╔ŽŽ┬Ų┬▀\äėĪŻ╦³┐╔ęįį┌100 Č╚ų┴-20 Č╚£žČ╚ģ^ķgĄ─ŁhŠ│ā╚▀\äėŻ¼─▄▀mæ¬śOČ╦£žČ╚ūā╗»Ż¼▀Ć┐╔ęįį┌žō▌d│¼▀^Ųõūįųž50▒ČĄ─ŪķørŽ┬ĘĆČ©▀\äėĪŻ
ė╔ė┌Š▀ėą┴╝║├Ą─▒Ē├µ▀mæ¬ąį║═žō▌d─▄┴”Ż¼Č°Ūę┐╔ęį▒╗Å─ūŽ═ŌĄĮ╝t═Ō╚½▓©Č╬Ą─╣Ō▀h│╠┐žųŲŻ¼Geca-Robot║▄▀m║Žį┌¬MšŁÉ║┴ėĄ─ŁhŠ│ųąū„śIĪŻ└²╚ńŻ¼┐╔į┌┴č╝y║═╔Ņ┐ėųą▀MąąĄž┘|┐▒╠ĮŻ¼ÅUąµ┴č┐pųą▀Mąą╦čŠ╚║═─┐ś╦Č©╬╗Ż¼╔§ų┴ĮĶų·┐╔┤®═ĖŲż─wĄ─╝t═Ō╣Ōį┤Ż¼į┌Š▀ėąÅ═ļs▒Ē├µą╬├▓Īó╦ßēAąįĪó£žČ╚║═رČ╚Ą─╔·╬’Ų„╣┘ā╚╗“č¬╣▄ųą▀Mąą╦Ä╬’▀f╦═╗“╩Ū▓ĪįŅÖz▓ķŻ¼æ¬ė├Øō┴”Š▐┤¾ĪŻ
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |


