é„ĖąŲ„╩ŪÖCŲ„╚╦Š▀ėąŅÉ╚╦ų¬ėX┼cĘ┤æ¬─▄┴”Ą─╗∙ĄAŻ¼╦³ŲĄĮā╚▓┐Ę┤ü┐žųŲŻ¼Ėąų¬▓ó┼c═Ō▓┐ŁhŠ│«a╔·Į╗╗źĄ─ū„ė├ĪŻę└ō■Öz£y
ī”Ž¾Ą─ŅÉäeŻ¼┐╔Ęų×ķė├ė┌£y┴┐ųŪ─▄ÖCŲ„╚╦ūį╔ĒĀŅæBĄ─ā╚▓┐é„ĖąŲ„║═ė├ė┌£y┴┐┼cÖCŲ„╚╦ū„śIŽÓĻPĄ─═Ō▓┐ę“╦žĄ─═Ō▓┐é„ĖąŲ„ĪŻ
ę└┐┐å╬ę╗Ą─é„ĖąŲ„čbų├Ż¼āH─▄═Ļ│╔Šų▓┐ą┼ŽóūRäeŻ╗×ķ┴╦½@╚Ī═Ļš¹ĪóĘĆČ©Ą─ŽĄĮyą┼ŽóŻ¼═©│Ż▓╔ė├ČÓį┤ą┼Žó╚┌║ŽĘĮ╩Į╠ßĖ▀ūR
äeĄ─£╩┤_┬╩ĪŻ
═©▀^▓╗═¼Ą─ĘĮĘ©┼cęĢĮŪ╩š╝»Ą─±Ņ║ŽĄ─öĄō■śė▒Š╝┤ČÓ─ŻæBöĄō■Ż¼ČÓį┤ą┼ŽóĮ╗▓µ╚┌║Ž╩Ū╠ßĖ▀ą┼ŽóūRäe┬╩Ą─ūŅų„
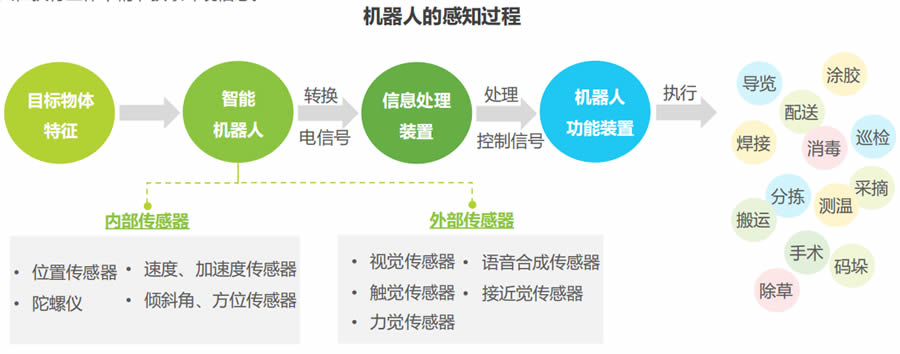
ę¬╩ųČ╬ĪŻį┌ÖCŲ„╚╦ŽĄĮy╔Ž┼õų├▓╗═¼ąį─▄Ą─é„ĖąŲ„Ż¼┐╔śŗĮ©╚┌║ŽęĢėXĪó┬ĀėXĪóė|ėXĄ╚Ėąų¬─▄┴”Ą─ŠC║ŽŽĄĮyŻ¼▒Ńė┌ųŪ─▄ÖCŲ„
╚╦į┌ł╠ąą╣żū„ųąŠ½£╩½@╚ĪŁhŠ│ą┼Žó
ā╚▓┐é„ĖąŲ„
1 ╬╗ų├é„ĖąŲ„
2 ═ė┬▌āx
3 ╦┘Č╚Īó╝ė╦┘Č╚é„ĖąŲ„
4 āAą▒ĮŪĪóĘĮ╬╗é„ĖąŲ„
═Ō▓┐é„ĖąŲ„
1 ęĢėXé„ĖąŲ„
2 ė|ėXé„ĖąŲ„
3 ┴”ėXé„ĖąŲ„
4 šZę¶║Ž│╔é„ĖąŲ„
5 ĮėĮ³ėXé„ĖąŲ„
ąŠŲ¼ų„꬞ōž¤ÖCŲ„╚╦ū„śIĄ─öĄō■ėŗ╦Ń║═ųĖ┴ŅŽ┬▀_;┐žųŲŲ„ų„꬞ōž¤░l▓╝║═é„▀fäėū„ųĖ┴Ņ;╦┼Ę■ȵÖCų„ę¬ė├ė┌“īäėÖCŲ„╚╦Ą─ĻP╣Ø;£p╦┘Ų„ų„ę¬░▓čbį┌ÖCŲ„╚╦ĻP╣Ø╠Ä
SLAM╩Ū╝┤ĢrČ©╬╗┼cĄžłDśŗĮ©,ų„ę¬ė├ė┌ĮŌøQÖCŲ„╚╦į┌ īŹļHŁhŠ│ųąĄ─Č©╬╗┼c▀\äėī¦║Įå¢Ņ};įŲŲĮ┼_×ķÖCŲ„╚╦╠ß╣®Ė³┤¾Ą─ą┼Žó┤µā”┐šķg║═ │¼ÅŖĄ─ėŗ╦Ń─▄┴”
ę╗ĘNė├ė┌ÖCąĄ▒█Ą──®Č╦▀BŚUčbų├,░³└©─®Č╦▀BŚUų„¾w,─®Č╦▀BŚUų„¾wįOų├į┌ÖCąĄ▒█Ą─▌ö│÷Č╦;ų┴╔┘ę╗éĆ╬š│ų▓┐Ż¼╬š│ų▓┐─▄ē“▒╗╬š│ų,┼c─®Č╦▀BŚUų„¾wę╗¾wĄžą╬│╔
╚╦ą╬ÖCŲ„╚╦Ą─ÖCąĄśŗįņÅ═ļs│╠Č╚Č╝▀hĖ▀ė┌¼FėąĄ─ÖCŲ„╚╦,Ė∙ō■Ė„▓┐╬╗▀\äėąĶŪ¾śŗĮ©ł╠ąąŠ½Č╚Ė▀Ą─“īäėŽĄĮyķ_░lŠ▀ėąĖ▀Č╚ĘĆČ©ąį║═▀mæ¬ąįĄ─┐žųŲŽĄĮy
ųC▓©£p╦┘Ų„╩Ūę╗ĘN┐┐▓©░l╔·Ų„╩╣╚ß▌å«a╔·┐╔┐žĄ─ÅŚąįūāą╬▓©,Ų„Š▀ėąå╬╝ēé„äė▒╚┤¾,¾wĘeąĪ,┘|┴┐ąĪ,▀\äėŠ½Č╚Ė▀Ą╚╠žš„;RV£p╦┘Ų„╩Ū╩Ūą²▐D╩Ė┴┐Ż©Rotary VectorŻ®£p╦┘Ų„Ą─║åĘQ
┼cRV╝░Ųõ╦¹Š½├▄£p╦┘Ų„ŽÓ ▒╚,ųC▓©£p╦┘Ų„╩╣ė├Ą─▓─┴Ž,¾wĘe╝░ ųž┴┐┤¾Ę∙Č╚Ž┬ĮĄ;Š½Č╚═∙═∙▓╗╝░ųC▓©£p╦┘Ų„,ę╗░Ńæ¬ė├ė┌ČÓĻP╣ØÖCŲ„╚╦ųąÖCū∙
ųąć°ÖCŲ„ęĢėX╝╝ągį┌╣żśIŅIė“æ¬ė├▌^ČÓ,«aśIĘų▓╝┼cųąć°ųŲ įņśI░l▀_Ąžģ^Ą─Ąž└Ē╬╗ų├┬ōŽĄ▌^Šo├▄,į┌ÅV¢|╩ĪĪóĮŁšŃ£¹Ą╚ Ąžģ^▌^╝»ųą,šQ╔·┴╦ČÓéĆųąć°ÖCŲ„ęĢėX«aśIµ£╔Žųąė╬²łŅ^Ų¾śI
┐╔╩╣ė├░ļī¦¾wŲ„╝■╗“īóĘ¹║ŽÜW─ĘČ©┬╔Ą─ļŖūĶąįį¬╝■ĘŌčbį┌░ļī¦¾wŲ„╝■╣▄Üżā╚ųŲ│╔Ą─░l¤ßį¬╝■ū„×ķ¤ßį┤,▒▄├Ō░ļī¦¾wŲ„╝■Ą─ī¦═©ĮŪī”╣”┬╩ėŗ╦ŃĄ─ė░Ēæ
1š■▓▀Ę÷│ų:ÖCŲ„╚╦«aśIĀIśI╩š╚ļ─ĻŠ∙į÷╦┘│¼▀^20%;2╔ńĢ■ę“╦ž:ä┌äė╣®Įo£p╔┘,╚╦┐┌└Ž²g╗»║═╚╦╣ż│╔▒Šū▀Ė▀;3ĮøØ·░lš╣:Ą┌╚²«aśIėą═¹└Łäėī”Ę■äšÖCŲ„╚╦Ą─ąĶŪ¾┴┐
CyberOne(ąĪ├ūäė┴”)╔ĒĖ▀177¾wųž52ūįė╔Č╚21ūŅ┤¾žō║╔1.5│╔▒Š70╚f╚╦├±Ä┼;Optimus╔ĒĖ▀172¾wųž73ūįė╔Č╚50ūŅ┤¾žō║╔9│╔▒Š2╚f├└į¬
ļŖÖC“īäė╔ŽŪµ╠ņų∙ōĒėą 2.3KWH,52V ļŖē║Ą─ļŖ│žĮM;28éĆČ©ųŲĻP╣Ø“īäėŲ„,6ĘNĻP╣Ø“īäė;▓╔ė├Ę┬╔·╦╝ŠSīóÖCŲ„╚╦ŽźĻP╣Øśŗįņ│╔╦─▀B═ŲŚUĮYśŗ
╠ž╦╣└Ł╚╦ą╬ÖCŲ„╚╦▓╔ė├ųŪ─▄±{±éözŽ±Ņ^┼cAutopilot ╦ŃĘ©,ā╚ų├ FSD ąŠŲ¼,─▄ē“ūRäeų▄ ć·╬’└ĒŁhŠ│Ą─Ė▀Ņl╠žš„▓ó▀Mąą┴ó¾wõų╚Š,┴╝║├Ą─┐šķgĖąų¬─▄┴”
╣■╣ż┤¾HIT-IIIÖCŲ„╚╦─▄═Ļ│╔╔Ž,Ž┬ą▒Ų┬Ą╚äėū„;THBIP-II╔ĒĖ▀ 0.75m,Š▀ėą 24 éĆūįė╔Č╚;WalkerÖCŲ„╚╦─▄═Ļ│╔╔Ž,Ž┬┼_ļAĄ╚äėū„;ĶF┤¾CyberOne 13 éĆĻP╣Ø║═21éĆūįė╔Č╚
╦═▓═ÖCŲ„╚╦═ŲÅV▀^│╠ųąę▓│÷¼F┴╦ę╗ą®╝╝ągŲ┐Ņi,į┌╦═▓═▀^│╠ųąčŁ█E┬ĘÅĮŲ½▓Ņ,╚╦ÖCĮ╗╗ź╣”─▄▓╗ē“ųŪ─▄╗»Ą╚å¢Ņ},čŁ█E▀^│╠ųą┬ĘÅĮĘĆČ©ąį║═šŽĄK╬’ūRäe┐╔┐┐ąį
ÖCŲ„╚╦ą─ņ`Ėąæ¬║═ŅÉ╦Ų╝╝ągīó╩╣ÖCŲ„╚╦į┌Ė³ÅVĘ║Ą─ŁhŠ│ųą▀MąąĮ╠īW,╩╣ė├╬ęéāĄ─ÖCŲ„╚╦▀bäėŽĄĮy╩š╝»┤¾ęÄ─ŻöĄō■Ż¼ęįĮ╠ÖCŲ„╚╦į┌¼FīŹ╩└Įńųąūįų„ąąäė║═▀mæ¬
1Ė▀ąį─▄£p╦┘Ų„;2Ė▀ąį─▄╦┼Ę■“īäėŽĄĮy;3ųŪ─▄┐žųŲŲ„;4ųŪ─▄ę╗¾w╗»ĻP╣Ø;5ą┬ą═é„ĖąŲ„;6ųŪ─▄─®Č╦ł╠ąąŲ„
ą┬╝ėŲ┬ć°┴ó┤¾īWŻ©NUSŻ®Ą─蹊┐╚╦åT└¹ė├ėó╠žĀ¢Ą─╔±Įøą╬æBąŠŲ¼LoihiŻ¼ķ_░l│÷┴╦ę╗ĘN╚╦įņŲż─wŻ¼╩╣ÖCŲ„╚╦─▄ē“ęį▒╚╚╦ŅÉĖąėX╔±ĮøŽĄĮy┐ņ1000▒ČĄ─╦┘Č╚Öz£yė|ėX
ą┬ą═ųŪ─▄ūź╚ĪÖCŲ„╚╦Ż¼ĮY║Ž╔ŅČ╚īW┴ĢĘĮĘ©Ż¼┘xėĶÖCŲ„╚╦ų„äė╠Į╦„Ėąų¬Ą──▄┴”Ż¼ĮŌøQ┴╦Affordance Map╚▒Ž▌Ż¼╠ßĖ▀┴╦ÖCŲ„╚╦į┌Å═ļsŁhŠ│Ž┬Ą─ūź╚Ī│╔╣”┬╩
╦╬įŲĘÕ▓®╩┐ĘųŽĒ┴╦LDV╝ż╣Ō£yš±╝░3DęĢėXé„Ėą╝╝ągį┌ųŪ─▄ÖCŲ„╚╦ųąĄ─æ¬ė├Ż¼ų„ę¬ĮķĮB┴╦ųŪ─▄ÖCŲ„╚╦╣ŌīWĖąų¬╝╝ągĪóLDV╝ż╣Ō£yš±╝░3DęĢėXé„Ėą╝╝ągįŁ└Ē╝░«aŲĘĮķĮBĪóæ¬ė├░Ė└²ĘųŽĒĄ╚ā╚╚▌




