

ÖC(j©®)Ų„╚╦ėąĮM╝■ę╗Ų╣żū„üĒ(l©ói)═Ļ│╔ę╗ĒŚ(xi©żng)╚╬äš(w©┤)ĪŻ─z¾w╩ŪŅw┴ŻŻ¼═©│ŻąĪė┌100╬ó├ūŻ¼ąĪĄĮ▓╗Ģ■(hu©¼)Å─╚▄ę║ųą│┴ĄĒ│÷üĒ(l©ói)ĪŻ─z¾wÖC(j©®)Ų„╚╦╩Ū─▄ē“Š▀ėąĖąæ¬(y©®ng)Īóėŗ(j©¼)╦ŃĪó═©ą┼Īó▀\(y©┤n)äė(d©░ng)║═─▄┴┐╣▄└ĒĄ╚╣”─▄Ą─┴ŻūėŻ¼▀@ą®╣”─▄Č╝ė╔┴Żūė▒Š╔Ē┐žųŲĪŻ╦¹éāĄ─įO(sh©©)ėŗ(j©¼)║═║Ž│╔╩ŪĮĶĶb▓─┴Ž┐ŲīW(xu©”)Īó─z¾w┐ŲīW(xu©”)ĪóūįĮMčbĪóÖC(j©®)Ų„╚╦╬’└ĒīW(xu©”)║═┐žųŲ└ĒšōĄ─┐ńīW(xu©”)┐Ų蹊┐Ą─ą┬┼dŅI(l©½ng)ė“ĪŻįSČÓ─z¾wÖC(j©®)Ų„╚╦ŽĄĮy(t©»ng)ūįų„ĄžĮėĮ³╔·╬’╝Ü(x©¼)░¹Ą─║Ž│╔░µ▒ŠŻ¼▓ó┐╔─▄░l(f©Ī)¼F(xi©żn)īó▀@ą®īŻķT╣”─▄ĦĄĮęįŪ░¤o(w©▓)Ę©įLå¢(w©©n)Ą─╬╗ų├Ą─ūŅĮKą¦ė├ĪŻ▒ŠęĢĮŪ蹊┐┴╦ą┬┼d╬─½I(xi©żn)Ż¼▓óÅŖ(qi©óng)š{(di©żo)┴╦īŹ(sh©¬)¼F(xi©żn)─z¾wÖC(j©®)Ų„╚╦Ą──│ą®įO(sh©©)ėŗ(j©¼)įŁät║═▓▀┬įĪŻ
─z¾wÖC(j©®)Ų„╚╦Ż©CRŻ®╩Ūūįų„Ņw┴ŻÖC(j©®)Ų„Ż¼į┌─z¾wŚl╝■Ž┬▓╔ė├Ī░ĖąėX(ju©”)-ėŗ(j©¼)äØ-ąąäė(d©░ng)Ī▒ĘČ╩ĮŻ¼─┐ś╦(bi©Īo)╩Ūīó╬óė^ÖC(j©®)Ų„╚╦ŽĄĮy(t©»ng)▓┐╩ĄĮą┬Łh(hu©ón)Š│ųąĪŻ▀@ĘNŁh(hu©ón)Š│ųąĄ─ūįų„ąį▒╗Č©┴x×ķÖC(j©®)Ų„į┌ø](m©”i)ėą═Ō▓┐“ī(q©▒)äė(d©░ng)║═▒O(ji©Īn)ČĮĄ─ŪķørŽ┬ū÷│÷øQ▓▀Ż©╗“Ī░ėŗ(j©¼)╦ŃĪ▒Ż®Ą──▄┴”ĪŻ┤╦ŅÉėŗ(j©¼)╦Ń┐╔ęį═©▀^(gu©░)ęįŽ┬ĘĮ╩Į▀M(j©¼n)ąąŻ║
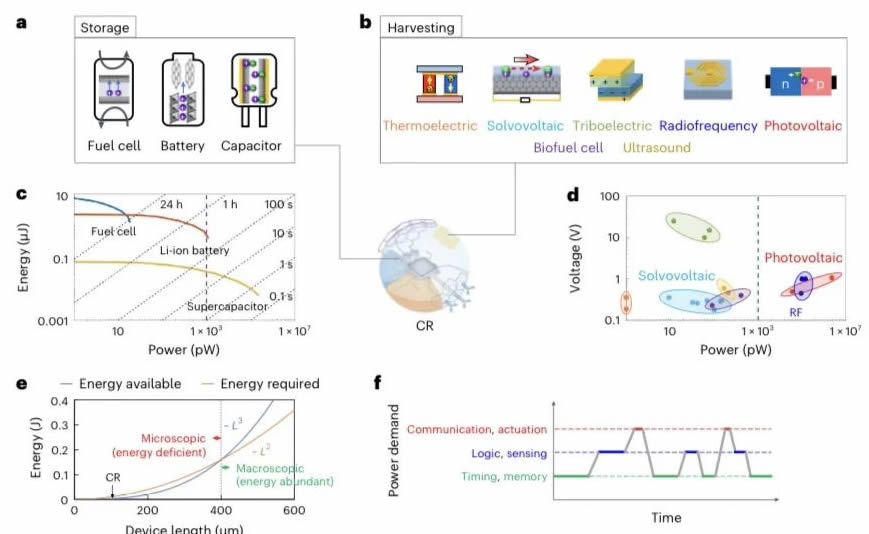
Ż©1Ż®ė├ė┌ą┼Žó▌ö╚ļĄ─é„ĖąŲ„
Ż©2Ż®ė├ė┌▀ē▌ŗėŗ(j©¼)╦Ń║═öĄ(sh©┤)ō■(j©┤)┤µā”(ch©│)Ą─ųąčļ╠Ä└Ēå╬į¬
Ż©3Ż®ė├ė┌ą┼Žóé„▌ö?sh©┤)─═©ą┼═©Ą?
Ż©4Ż®“ī(q©▒)äė(d©░ng)║═▀\(y©┤n)äė(d©░ng)─Ż╩Į║═/╗“
Ż©5Ż®▄ć▌d─▄┴┐╩š╝»║═/╗“┤µā”(ch©│)å╬į¬ęį─ŻēK╗»ĘĮ╩Į╝»│╔ĄĮ─z¾w╬óŅw┴ŻųąĪŻ
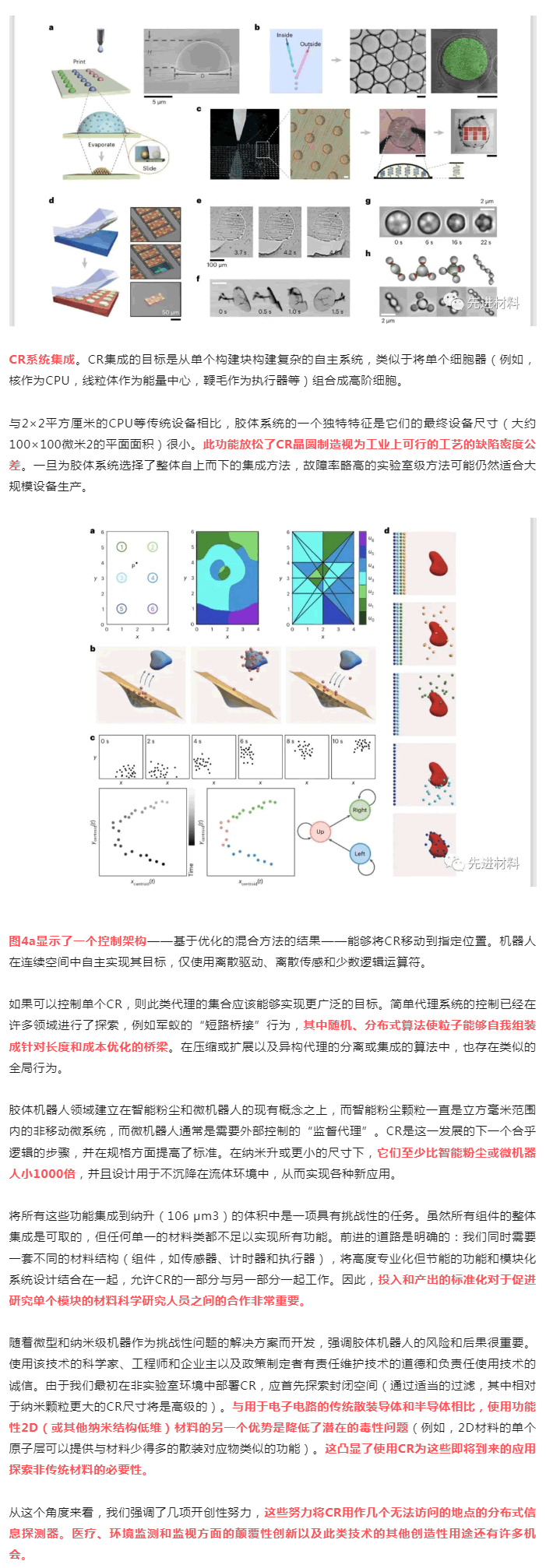
ļSų°ÖC(j©®)Ų„╚╦įO(sh©©)éõ┐sąĪĄĮüå║┴├ū│▀┤ńŻ¼╦³éāķ_(k©Īi)╩╝│ąō·(d©Īn)─z¾wŽĄĮy(t©»ng)Ą─ąą×ķĪŻĄõą═Ą──z¾w¼F(xi©żn)Ž¾Ż¼╚ń▓╝└╩▀\(y©┤n)äė(d©░ng)ĪóŠ█╝»║═│┴ĘeŻ¼┐╔ęį▒╗ęĢ×ķąĶę¬┐╦Ę■Ą─╠¶æ(zh©żn)ąįšŽĄKŻ¼╗“╩╣CRįO(sh©©)ėŗ(j©¼)Ą─╠žš„Ą├ęį└¹ė├ĪŻ╦³éā¾wĘeąĪŻ¼║▄╚▌ęūĘų╔óĪŻ╩ūŽ╚Ż¼╦³éāĄ─¤ß─▄Ģ■(hu©¼)ī¦(d©Żo)ų┬╬╗ų├║═ĘĮŽ“╔ŽĄ─┤¾┴┐╬╗ęŲŻ¼ī¦(d©Żo)ų┬ęįŠĆąį║═ą²▐D(zhu©Żn)öU(ku©░)╔óŽĄöĄ(sh©┤)×ķ╠žš„Ą─ļSÖC(j©®)┬■▓ĮŻ©▓╝└╩▀\(y©┤n)äė(d©░ng)Ż®ĪŻę“┤╦Ż¼CRĄ─╬╗ų├║═ĘĮŽ“┐╔─▄Ģ■(hu©¼)┐ņ╦┘║═▓╗┐╔ŅA(y©┤)£y(c©©)Ąžūā╗»Ż¼╚ń╣¹▓╝└╩▀\(y©┤n)äė(d©░ng)┼cŲõ═Ų▀M(j©¼n)╦┘Č╚ŽÓĘQŻ¼▀@ī”(du©¼)Å─A³c(di©Żn)ĄĮB³c(di©Żn)Ą─ÖC(j©®)Ų„╚╦śŗ(g©░u)│╔┴╦╠¶æ(zh©żn)ĪŻ┴Ēę╗ĘĮ├µŻ¼▀@ęŌ╬Čų°ūŃē“ąĪĄ─CRīóöU(ku©░)╔óŻ¼āH╩╣ė├Łh(hu©ón)Š│¤ß─▄Ż©└²╚ńŻ¼▒O(ji©Īn)£y(c©©)╗»īW(xu©”)Ę┤æ¬(y©®ng)ČčųąĄ─Śl╝■Ż®═©▀^(gu©░)Įķ┘|(zh©¼)ūįė╔öU(ku©░)╔óĪŻ
ī¦(d©Żo)ų┬CRĘų╔óąįĄ─Ą┌Č■éĆ(g©©)ĻP(gu©Īn)µIę“╦ž╩ŪŲõ▒Ē├µĘe┼c¾wĘe▒╚ŽÓī”(du©¼)▌^Ė▀Ż¼▀@ī¦(d©Żo)ų┬┼cę²┴”Ę┤▓┐ĘųŽÓ▒╚ūĶ┴”ÅŖ(qi©óng)Ż¼ūŅĮKī¦(d©Żo)ų┬─z¾wŅw┴ŻĄ─│┴ĮĄ╦┘Č╚ŠÅ┬²ĪŻį┌▀@ĘNŪķørŽ┬Ż¼Ī░ŠÅ┬²Ī▒╚ĪøQė┌╔ŽŽ┬╬─Ż║ŅÉ╦ŲĄ─│┴ĮĄ╦┘Č╚┐╔─▄ęŌ╬Čų°CRsį┌ė╬ėŠ│žųąæęĖĪöĄ(sh©┤)╠ņŻ¼Ą½į┌Äū├ļńŖā╚(n©©i)Å─č¬╣▄ųą│┴Ęe│÷üĒ(l©ói)ĪŻ┴╦ĮŌCR│┴ĮĄąą×ķ▓╗āHį┌╦«Łh(hu©ón)Š│ųą║▄ųžę¬Ż¼Č°Ūęį┌┐šÜŌųąŻ¼ī”(du©¼)ė┌┐╔ÜŌ╚▄─zļŖūėŽĄĮy(t©»ng)ĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |



