╚╦ą╬ÖCŲ„╚╦Ą─Łh(hu©ón)Š│Ėąų¬ĘĮ░Ė╗“┐╔ŅÉ▒╚ųŪ─▄Ų¹▄ćŻ¼Łh(hu©ón)Š│Ėąų¬╩Ūī”ė┌Łh(hu©ón)Š│Ą─ł÷Š░└ĒĮŌ─▄┴”Ż¼
└²╚ńšŽĄK╬’Ą─ŅÉą═ĪóĄ└┬Ęś╦(bi©Īo)ųŠ╝░ś╦(bi©Īo)ŠĆĪóąą▄ć▄ć▌vĄ─Öz£yĪóĮ╗═©ą┼ŽóĄ╚öĄ(sh©┤)ō■(j©┤)Ą─šZčįĘųŅÉĪŻŁh(hu©ón)Š│
Ėąų¬ąĶę¬═©▀^é„ĖąŲ„½@╚Ī┤¾┴┐Ą─ų▄ć·Łh(hu©ón)Š│ą┼ŽóŻ¼┤_▒Żī”▄ć▌vų▄ć·Łh(hu©ón)Š│Ą─š²┤_└ĒĮŌŻ¼▓ó╗∙ė┌┤╦
ū÷│÷ŽÓæ¬(y©®ng)Ą─ęÄ(gu©®)äØ║═øQ▓▀ĪŻ
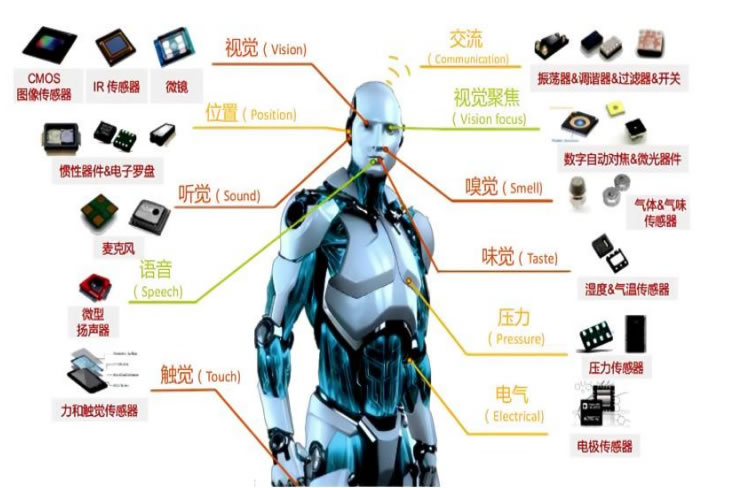
═¼śėĄžŻ¼╚╦ą╬ÖCŲ„╚╦ę▓ąĶę¬Ėąų¬ŽĄĮy(t©»ng)┼ąöÓų▄įŌŁh(hu©ón)Š│ĪŻė╔ė┌Ė„ŅÉŁh(hu©ón)Š│Ėąų¬é„ĖąŲ„į┌Ėąų¬ąį
─▄╔ŽĖ„ėąā×(y©Łu)┴ėŻ¼┤¾▓┐ĘųŲ¾śI(y©©)Ģ■▓╔ė├╗ņ║ŽĘĮ░ĖĪŻ
|
ąį─▄
|
özŽ±Ņ^
|
║┴├ū▓©└ū▀_(d©ó)
|
╝ż╣Ō└ū▀_(d©ó)
|
│¼┬Ģ▓©└ū▀_(d©ó)
|
|
£yŠÓ/£y╦┘
|
┐╔īŹ¼F(xi©żn)£yŠÓŻ¼Ą½Š½Č╚▌^
Ą═
|
┐vŽ“Š½Č╚Ė▀Ż¼ÖMŽ“
Š½Č╚Ą═
|
Ė▀Š½Č╚
|
Ė▀Š½Č╚
|
|
Ėąų¬ŠÓļx
|
Äū╩«├ū
|
┐╔▀_(d©ó)200├ūęį╔Ž
|
┐╔▀_(d©ó)200├ūęį╔Ž
|
ę╗░Ń2├ūęįā╚(n©©i)
|
|
ąą╚╦Īó╬’¾wūRäe
|
═©▀^AI╦ŃĘ©ūRäeŻ¼Ą½ļy
ęįūRäeĘŪś╦(bi©Īo)£╩(zh©│n)šŽĄK╬’
|
ļyęįūRäe
|
3DĮ©─ŻŻ¼ęūūRäe
|
┐╔ūRäe
|
|
┬Ęś╦(bi©Īo)ūRäe
|
┐╔ūRäe
|
¤oĘ©ūRäe
|
¤oĘ©ūRäe
|
¤oĘ©ūRäe
|
|
É║┴ė╠ņÜŌ
|
ęū╩▄ė░Ēæ
|
▓╗╩▄ė░Ēæ
|
ęū╩▄ė░Ēæ
|
▓╗╩▄ė░Ēæ
|
|
£žČ╚ĘĆ(w©¦n)Č©ąį
|
Ė▀
|
Ė▀
|
Ė▀
|
Ą═
|
|
▀\ąą╦┘Č╚£y┴┐─▄┴”
|
╚§
|
ÅŖ
|
ÅŖ
|
ę╗░Ń
|
|
╣Ōšš
|
│²ę╣ęĢ╝t═ŌČ╝ė░Ēæ
|
▓╗╩▄ė░Ēæ
|
▓╗╩▄ė░Ēæ
|
▓╗╩▄ė░Ēæ
|
|
╦ŃĘ©╝╝ąg(sh©┤)│╔╩ņČ╚
|
Ė▀
|
▌^Ė▀
|
ę╗░Ń
|
Ė▀
|
|
│╔▒Š
|
ę╗░Ń
|
▌^Ė▀
|
Ė▀
|
Ą═
|
|
ūįäė±{±éų„ę¬æ¬(y©®ng)ė├
ł÷Š░
|
▄ćĄ└Ų½ļxŅA(y©┤)Š»Īó▄ćĄ└▒Ż
│ųŽĄĮy(t©»ng)Īó├żģ^(q©▒)▒O(ji©Īn)£yŽĄ
Įy(t©»ng)ĪóŪ░▄ćĘ└ū▓ŅA(y©┤)Š»ĪóĮ╗
═©ś╦(bi©Īo)ųŠūRäeĪóĮ╗═©ą┼╠¢
Č«ūRäeĪó╚½Š░▓┤▄ć
|
ūį▀mæ¬(y©®ng)č▓║Į┐žųŲŽĄ
Įy(t©»ng)Īóūįäėäx▄ć▌oų·
ŽĄĮy(t©»ng)
|
īŹ╩®Į©┴ó▄ć▌vų▄▀ģ
Łh(hu©ón)Š│Ą─╚²ŠS─Żą═
|
▓┤▄ć▌oų·
|
▒Š╠’ ASIMOė╔╦─éĆ▀\ąąų° VxWorks īŹĢr▓┘ū„ŽĄĮy(t©»ng)Ą─╠Ä└ĒŲ„śŗ(g©░u)│╔;ÜWų▐ ICUB╩╣ė├├¹×ķ ARCHER Ą─īW(xu©”)┴Ģ(x©¬)ą═╦ŃĘ©¾wŽĄ;╠ž╦╣└Ł Optimusė├Optimus Ą─╔±Įø(j©®ng)ŠW(w©Żng)Įj(lu©░)
╚╦ą╬ÖCŲ„╚╦īóīŹ¼F(xi©żn)Å─0ĄĮ1┴┐«a(ch©Żn)Ż¼Ė∙ō■(j©┤)╬ęéā£y╦ŃŻ¼2025─Ļ║═2030─Ļ╚½Ū“╚╦ą╬ÖCŲ„╚╦╩ął÷ęÄ(gu©®)─Ż Ęųäeėą═¹▀_(d©ó)ĄĮ1.4ā|į¬║═249.5ā|į¬Ż¼2025-2030─Ļ╚½Ū“╚╦ą╬ÖCŲ„╚╦CAGRėą═¹▀_(d©ó)ĄĮ182%
╚╦ą╬ÖCŲ„╚╦ņ`Ū╔╩ų▀M(j©¼n)ąąūź╚Īäėū„Ż¼┐šą─▒ŁļŖÖC×ķ║╦ą─▓┐╝■Ż╗ą┼╠¢ĮŌ╬÷ ģR┐éł╠(zh©¬)ąą ▌ö│÷▐D(zhu©Żn)╦┘ Ż©Ė▀╦┘ĪóĄ═┼żŠžŻ® ĮĄ╦┘į÷┼ż ų▒ŠĆé„äė▐D(zhu©Żn) ōQ×ķą²▐D(zhu©Żn)é„ äė “ī(q©▒)äėé„ī¦(d©Żo) Ėąų¬╝░┴” Ę┤ü
ą²▐D(zhu©Żn)ł╠(zh©¬)ąąŲ„Ęų▓╝ė┌╝ń▓┐Īó╩ų▓┐Ą╚ČÓūįė╔Č╚ĻP(gu©Īn)╣Ø(ji©”)Ż¼ū„ė├╩Ūīó─│╬’ą²▐D(zhu©Żn)ĄĮę╗Č©ĮŪČ╚═Ļ│╔ą²▐D(zhu©Żn)▀\äė;“ī(q©▒)äėĻP(gu©Īn)╣Ø(ji©”)═Ļ│╔ą²▐D(zhu©Żn)äėū„Ż¼£p╦┘Ų„×ķ║╦ą─▓┐╝■
ŠĆąįł╠(zh©¬)ąąŲ„╬╗ė┌ŽźųŌĄ╚å╬ūįė╔Č╚╝░═¾§ūĄ╚ļpūįė╔Č╚ĻP(gu©Īn)╣Ø(ji©”)Ż¼īóļŖÖCą²▐D(zhu©Żn)▀\äė▐D(zhu©Żn)×ķų▒ŠĆ▀\äė;ūāą²▐D(zhu©Żn)▀\äė×ķų▒ŠĆ▀\äėŻ¼ąąąŪØLų∙ĮzĖ▄×ķ║╦ą─▓┐╝■
╚╦ą╬ÖCŲ„╚╦Ėąų¬ŽĄĮy(t©»ng)│╔▒Šš╝▒╚7.3%,ł╠(zh©¬)ąąŽĄĮy(t©»ng)│╔▒Šš╝▒╚53.2%;ŠĆąįł╠(zh©¬)ąąŲ„│╔▒Šš╝▒╚31.0%;ą²▐D(zhu©Żn)ł╠(zh©¬)ąąŲ„│╔▒Šš╝▒╚17.9%;Ųõ╦¹│╔▒Šš╝▒╚39.5%
ł╠(zh©¬)ąąŽĄĮy(t©»ng)BOMš╝▒╚ūŅĖ▀Ż¼╝s53.2%Ż©Ųõųąų▒ŠĆĪóą²▐D(zhu©Żn)Īó╩ų▓┐Ęųäe š╝31.0%Īó17.9%Īó4.3%Ż®Ż╗Ėąų¬ŽĄĮy(t©»ng)š╝7.3%Ż¼Ųõ╦¹ąŠŲ¼ĪóļŖ│žĄ╚▓┐╝■║Žėŗš╝▒╚39.5%
ć°Ę└┐Ų╝╝┤¾īW(xu©”)Blackman;╣■Ā¢×I╣żśI(y©©)┤¾īW(xu©”)HIT Humanoid; └Ē╣żģR═»;šŃĮŁ┤¾īW(xu©”)╬“┐š;ā×(y©Łu)▒ž▀xWalkerXĪóā×(y©Łu)ėŲ;ąĪ∙iŲ¹▄ćPX5;▀_(d©ó)ĻY┐Ų╝╝XR-4;▒▒Š®õōĶFéb
╚½Ū“┐šą─▒Ł╩ął÷ęÄ(gu©®)─ŻÅ─2021─ĻĄ─6.75ā|├└į¬į÷ķLų┴2025─ĻĄ─9.36ā|į¬Ż¼CAGR×ķ8.52%ĪŻ2021─Ļ╚½Ū“┐šą─▒ŁļŖÖC╩ął÷ęÄ(gu©®)─ŻāHš╝╬ó╠žļŖÖCĄ─1.73%
╠ž╦╣└ŁĄ─═Ōė^īŻ└¹╚½▓┐ėąą¦Ż¼Ūęų„ę¬╝»ųąį┌╚š▒ŠŻ©4 ╝■Ż®║═ÜWų▐Ż©1 ╝■Ż®,Ųõ╦¹ęč╔ĻšłĄ─ĘĮĘ©ŅÉĪóĮY(ji©”)śŗ(g©░u)ŅÉīŻ└¹┐╔─▄╔ą╬┤╣½ķ_
╝╝ąg(sh©┤)«ö(d©Īng)Ū░░l(f©Ī)š╣ļAČ╬╝░┌ģä▌Ż║ųĖ│÷╝╝ąg(sh©┤)▀M(j©¼n)╚ļĘĆ(w©¦n)Č©░l(f©Ī)š╣ļAČ╬Ż¼▒Š¾wĮY(ji©”)śŗ(g©░u)ĪóųŪ─▄Ėąų¬Īó▀\äė┐žųŲ╩Ū¤ß³c;╠ß╣®┴╦ī”╚╦ą╬ÖCŲ„╚╦╝╝ąg(sh©┤)░l(f©Ī)š╣Īó«a(ch©Żn)śI(y©©)▓╝ŠųĪó╩ął÷┌ģä▌║═╬┤üĒĘĮŽ“Ą─╔Ņ╚ļęŖĮŌ
Ųż─wĄ─ČÓ─ŻæB(t©żi)Ėąų¬×ķ╬ęéāĖą╩▄šµīŹĄ─╬’└Ē╩└Įń╠ß╣®┴╦ųžę¬Ą─╣żŠ▀,ÖCŲ„╚╦▒Ń─▄Ėąų¬ĄĮ╬’ŲĘĄ─┤ų▓┌Č╚,Ė¶┐šĘ„▀^╬╗ų├╬’ŲĘĢrŻ¼╦³╔§ų┴─▄Ž±X╔õŠĆ║═3DÆ▀├Ķāx─ŪśėĖąų¬ĄĮ╬’ŲĘĄ─▓─┘|(zh©¼)║═ą╬ĀŅ




